Home
>
Reprappers
>
Topic
Core ZXZY Build Log
Posted by zxzy_eng
|
Core ZXZY Build Log January 20, 2023 12:22AM |
Registered: 1 year ago Posts: 3 |
So this idea came to me a couple years ago while I was rolling around in bed trying to think up new 3D printer kinematics... something I used to do on occasion.
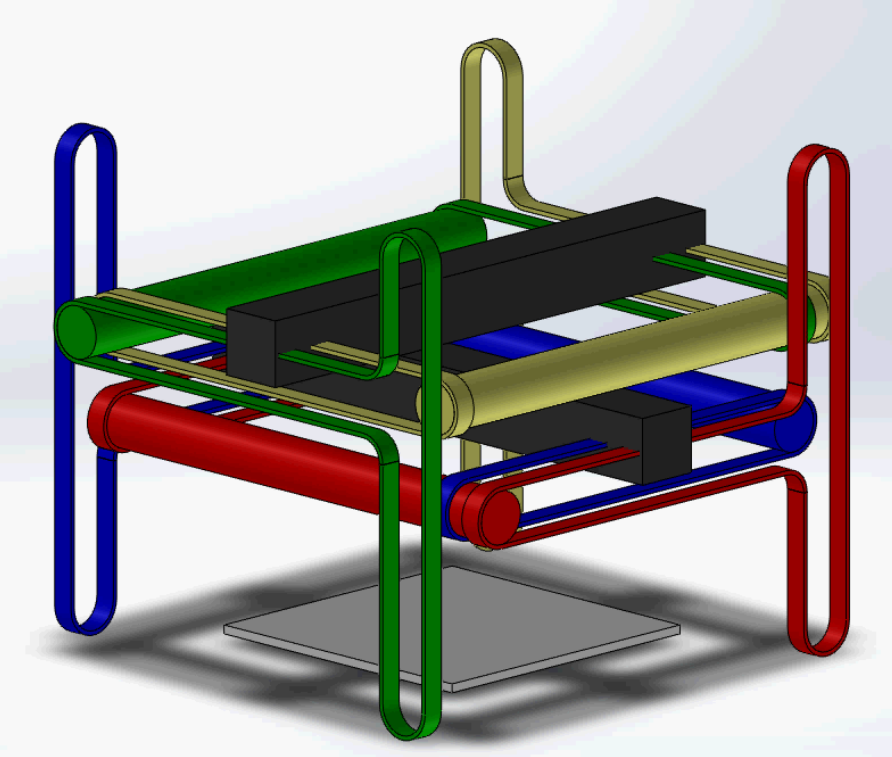
I basically took a core-xz machine and duplicated that and rotated it 90deg, so the bed is fixed and the gantry does all the work. It is basically both a core-xz AND a core-yz system, with the possible feature of being able to do a small amount of tramming to a fixed bed.
When the blue and red belts turn the same direction you get pure X movement, when the green and yellow belts turn the same direction, you get pure Y movement. When those pairs of motors turn in opposing directions, you get Z-movement if they work with each other and saddling/pringling/tramming if they work against each other. If you draw a sideways T on 4 square pieces of paper then fold them into the sides of a cube. That's how the main drive belts are wound. You need another belt on the opposite side of each so that contraposed belt motion doesn't twist the cross bar going across the gantry, and you maintain the core-z(xy) constraints. The result could kind of be considered a cross between a Voron and an Ultimaker, but probably without all the benefits of either, haha. There are also some elements of Delta design in there if you consider the rotational symmetry and economical use of motors. Ultiron? Vortimaker? Deltesian^2? Core-XYZ? I dunno man. I kind of like core-ZXZY as a name, pronounced however you feel like pronouncing it.
Curious to know what y'all think.
Some possible upsides might be:
- same number of motors as a dual Z axis cartesian for cost savings (could use an SKR 3 or other boards that have 5 stepper drivers)
- form factor of a cartesian, with the fixed bed and stationary low COG motor placement of a delta
- easy to enclose in a heated chamber while keeping motors out of it
- 2 motors and 4 belts! (oy vay) for each horizontal axis, so I'd expect torque to be high with low ringing, for fast gantry movement.
Concerns:
- alignment / squareness
- linear motion on rotating rods, but I haven't heard too many complaints about Ultimaker quality (technically this could still be done using all linear rails and just long 5 or 6mm shafts to transfer the belt motion, but that gets expensive quick)
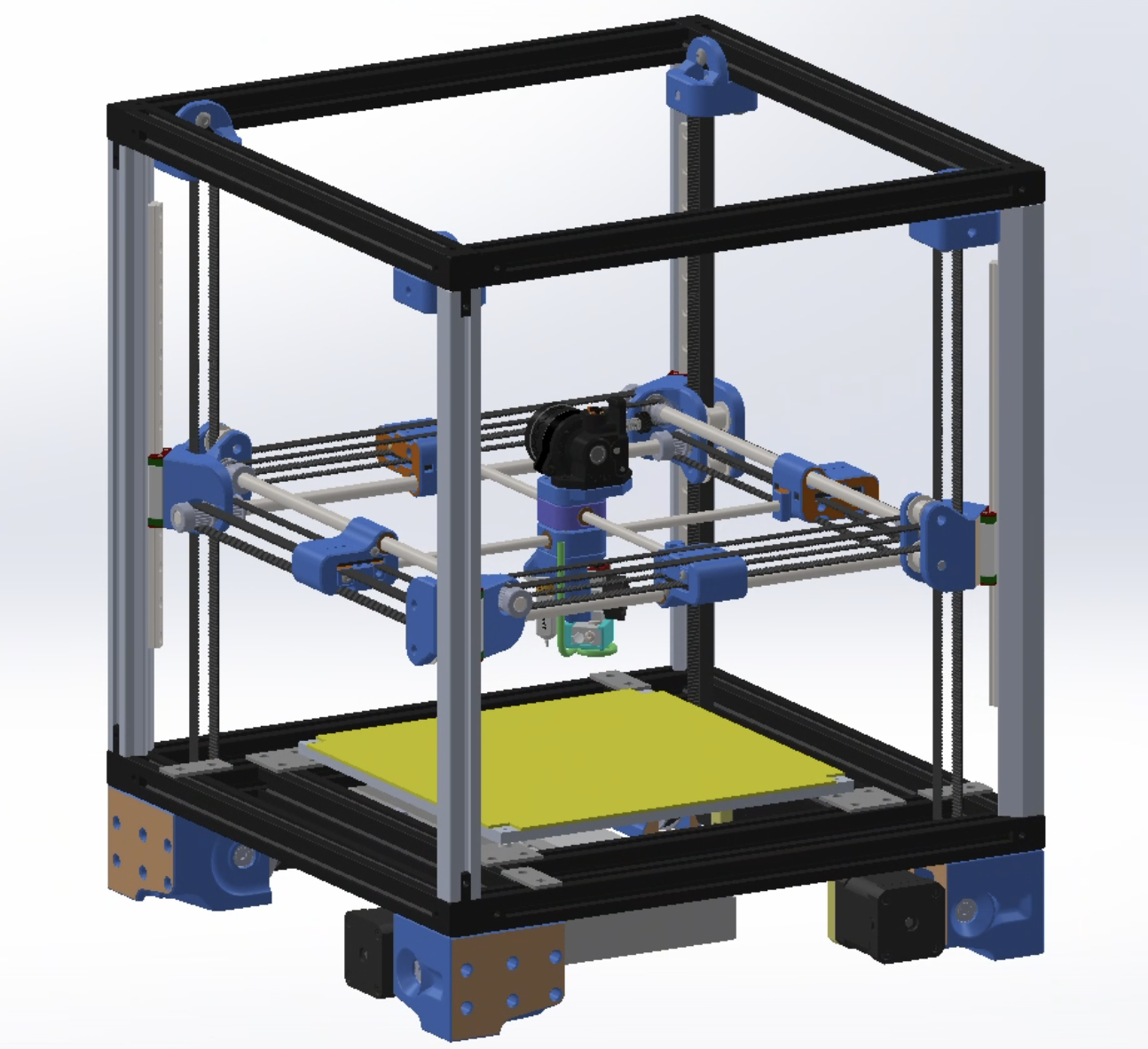
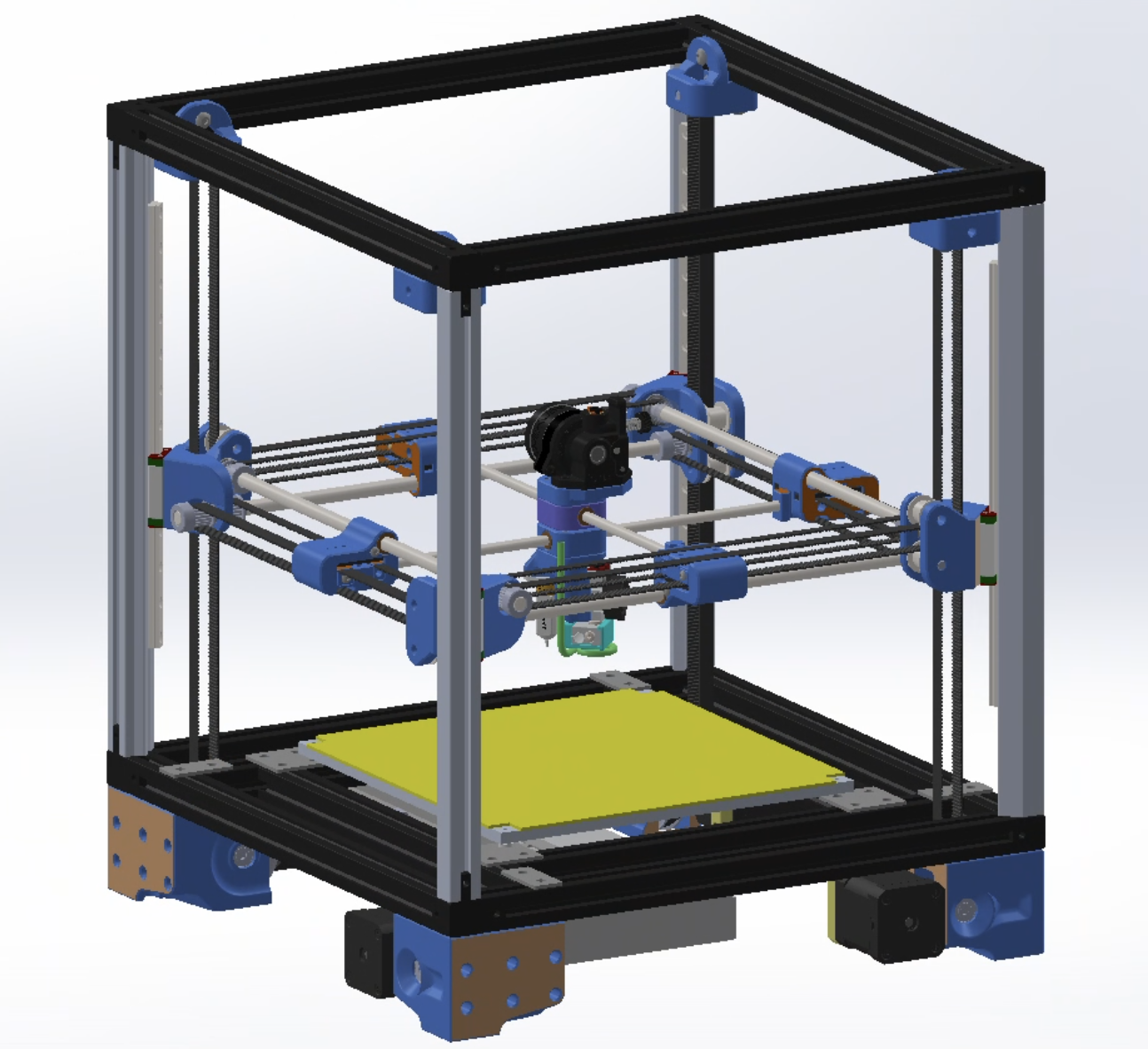
This will be the 4th printer I've built, the 2nd I've designed from scratch, and the first with what seem to be relatively novel kinematics as far as I can google.
Here's a video of what happened in my brain when I came up with it
“Left to his own devices he couldn’t build a toaster. He could just about make a sandwich and that was it." - Douglas Adams
I basically took a core-xz machine and duplicated that and rotated it 90deg, so the bed is fixed and the gantry does all the work. It is basically both a core-xz AND a core-yz system, with the possible feature of being able to do a small amount of tramming to a fixed bed.
When the blue and red belts turn the same direction you get pure X movement, when the green and yellow belts turn the same direction, you get pure Y movement. When those pairs of motors turn in opposing directions, you get Z-movement if they work with each other and saddling/pringling/tramming if they work against each other. If you draw a sideways T on 4 square pieces of paper then fold them into the sides of a cube. That's how the main drive belts are wound. You need another belt on the opposite side of each so that contraposed belt motion doesn't twist the cross bar going across the gantry, and you maintain the core-z(xy) constraints. The result could kind of be considered a cross between a Voron and an Ultimaker, but probably without all the benefits of either, haha. There are also some elements of Delta design in there if you consider the rotational symmetry and economical use of motors. Ultiron? Vortimaker? Deltesian^2? Core-XYZ? I dunno man. I kind of like core-ZXZY as a name, pronounced however you feel like pronouncing it.
Curious to know what y'all think.
Some possible upsides might be:
- same number of motors as a dual Z axis cartesian for cost savings (could use an SKR 3 or other boards that have 5 stepper drivers)
- form factor of a cartesian, with the fixed bed and stationary low COG motor placement of a delta
- easy to enclose in a heated chamber while keeping motors out of it
- 2 motors and 4 belts! (oy vay) for each horizontal axis, so I'd expect torque to be high with low ringing, for fast gantry movement.
Concerns:
- alignment / squareness
- linear motion on rotating rods, but I haven't heard too many complaints about Ultimaker quality (technically this could still be done using all linear rails and just long 5 or 6mm shafts to transfer the belt motion, but that gets expensive quick)
This will be the 4th printer I've built, the 2nd I've designed from scratch, and the first with what seem to be relatively novel kinematics as far as I can google.
Here's a video of what happened in my brain when I came up with it
“Left to his own devices he couldn’t build a toaster. He could just about make a sandwich and that was it." - Douglas Adams
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: Core ZXZY Build Log January 20, 2023 02:50AM |
Registered: 10 years ago Posts: 14,672 |
Looks interesting! As the kinematics is linear, RepRapFirmware supports it already, without even having to recompile.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Core ZXZY Build Log January 20, 2023 03:22AM |
Registered: 9 years ago Posts: 31 |
Quote
dc42
Looks interesting! As the kinematics is linear, RepRapFirmware supports it already, without even having to recompile.
In theory, the kinematics are linear-- but with a floppy moving gantry and >3 independent motors, I've started wondering recently if a more generalized model that takes axial skew and twist into account might be a better approach for these types of machines (also Voron, CoreXYZ). Under such a model, leveling and gantry-squaring routines across arbitrary kinematics or drive arrangements (up to 7-DoF, by my reckoning) could be generalized into a single homing/calibration algorithm.
|
Re: Core ZXZY Build Log January 20, 2023 02:12PM |
Registered: 1 year ago Posts: 3 |
Quote
dc42
Looks interesting! As the kinematics is linear, RepRapFirmware supports it already, without even having to recompile.
That is dope. I was going to try to fork Klipper, but if RRF works out of the box, I'll take it! Also, dc42, what a legend!
Edited 2 time(s). Last edit at 01/20/2023 03:10PM by zxzy_eng.
|
Re: Core ZXZY Build Log January 21, 2023 08:04AM |
Registered: 11 years ago Posts: 5,780 |
Does this have some not-immediately-obvious advantage over the more traditional implementation of a corexy mechanism with a separate Z axis?
A couple years ago, while watching my very large corexy sand table mechanism running, I noticed some wobble in the X axis as the carriage moved in X. That got me suspecting something similar could happen in the corexy stage of my 3D printer so I set up a gauge and measured it. I found wobble in the positions of the X axis along the Y axis that appeared to be a function of an imperfectly drilled drive pulley. In my printer the error occurs in XY motion and affects the accuracy, but not the precision of the mechanism. With your design I can see similar wobble occurring in the Z axis, but in two mechanisms with 4 belts and drive pulleys doing the Z lift, I think you're creating an unstable platform where both the accuracy and precision may be affected by any imperfections (poorly drilled pulleys, belts not perfectly parallel to the Z axis guide rails, etc.) in the drive mechanism. All four corners of the xy extruder stage have to lift the exact same amount or the xy stage will wobble in Z.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
A couple years ago, while watching my very large corexy sand table mechanism running, I noticed some wobble in the X axis as the carriage moved in X. That got me suspecting something similar could happen in the corexy stage of my 3D printer so I set up a gauge and measured it. I found wobble in the positions of the X axis along the Y axis that appeared to be a function of an imperfectly drilled drive pulley. In my printer the error occurs in XY motion and affects the accuracy, but not the precision of the mechanism. With your design I can see similar wobble occurring in the Z axis, but in two mechanisms with 4 belts and drive pulleys doing the Z lift, I think you're creating an unstable platform where both the accuracy and precision may be affected by any imperfections (poorly drilled pulleys, belts not perfectly parallel to the Z axis guide rails, etc.) in the drive mechanism. All four corners of the xy extruder stage have to lift the exact same amount or the xy stage will wobble in Z.
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Core ZXZY Build Log January 25, 2023 01:32AM |
Registered: 1 year ago Posts: 3 |
Quote
the_digital_dentist
A couple years ago, while watching my very large corexy sand table mechanism running, I noticed some wobble in the X axis as the carriage moved in X. That got me suspecting something similar could happen in the corexy stage of my 3D printer so I set up a gauge and measured it. I found wobble in the positions of the X axis along the Y axis that appeared to be a function of an imperfectly drilled drive pulley. In my printer the error occurs in XY motion and affects the accuracy, but not the precision of the mechanism. With your design I can see similar wobble occurring in the Z axis, but in two mechanisms with 4 belts and drive pulleys doing the Z lift, I think you're creating an unstable platform where both the accuracy and precision may be affected by any imperfections (poorly drilled pulleys, belts not perfectly parallel to the Z axis guide rails, etc.) in the drive mechanism. All four corners of the xy extruder stage have to lift the exact same amount or the xy stage will wobble in Z.
Hi Mr. Rehorst! Very familiar with your blog and UMMD. I realize there are a number of issues that may impact the performance of this design. I think the biggest oversight on my part is that it's NOT a "core" anything. Even though the motion equations are the same. The idler placement in a core-xy is critical to get the anti-racking effect of equalized force in Y (Z in my setup) while accelerating in X. I think that's the main thing that'd make my platform unstable. I was willing to live with imperfections caused by sub par manufacturing tolerances/quality merely to demonstrate that it's possible to make a printer that can technically do Voron-style auto-tramming with decent speed and quality with only four stationary motors.
Quote
the_digital_dentist
Does this have some not-immediately-obvious advantage over the more traditional implementation of a corexy mechanism with a separate Z axis?
Possibly! but that wasn't necessarily what I was going for so why did I do any of this and not just build a Voron?
I think the Voron is awesome, and those guys obviously put a ton of thought into the design. I was just playing with the idea of moving motors out of the build volume and using fewer of them which I thought could be done for some cost savings without much a hit to quality. I think there's a nice kind of elegance in this design with the rotational symmetry and the making efficient use of four motors. But I see a pretty gaping design flaw in my design now where the gantry will have an unbalanced twisting force during planar motion like a non-rigid H-bot under normal X and Y accelerations.
First I thought about fixing this with a counter-balancing mass on each corner with spectra line wrapped around the top and bottom and attached to the Z-carriage.
But I think I'm going to go ahead and change the design to use the standard core-xy setup on all 4 sides. So it'll really be a core-xzyz setup. The drive shafts will be on the bottom and then you don't get the "lag" that would happen here with 2 drive shafts (the motor's and the gantry rod shaft). Both sides, if tensioned equally would have the same effect on the gantry. I'll also use linear rails in a cross bar configuration, like Wes Cherry's CroXY build, which will make for a way more rigid gantry. A downside would be losing the ability to tram the gantry, but I think that's one of the nice things about the crossed bar gantry (in addition to it's rigidity and resilience to torques in both Rx and Ry) is that it can be be assembled such that it doesn't need to be trammed regularly. I suspect that with the new design, I'll be able to get away with just a mesh bed level, but if I really want to go full-function, I could add back the two motors I dropped and use them to rotate the bed in Rx and Ry.
Another possible benefit of this type of setup is that ANY motion in the XY plane is exactly that special case of a typical core-XY system where two motors work equally hard to move the axis. If you look at diagonal motion for a typical core-xy, one motor is operating at its holding torque and the other is doing all the work, likely at a significantly higher speed with significantly less torque. In my setup, two motors are always working equally hard to move the X axis and the other two are working equally hard to move the Y axis for any XY-planar motion. For that reason I expect to get higher speeds with less risk of skipping steps.
Also, I now plan to use 4x6mm belts for each axis, so thats 24mm (wide) of belt that has to stretch, compared to the 12mm of belt width that is typical of, say a Voron. So I expect less ringing since I think both my X and Y axes should have a mass roughly equivalent to the Y gantries you see out there on traditional core-xy builds. This would be less of an advantage for really tall builds, but you could always use wider belts then.
I'll finish the updated design soon and upload it. Really looking forward to more helpful critiques. And while it's not going to be a "breakthrough" by any means, I think its pros will outweigh its cons and therefore justify the build enough for me.
Edited 2 time(s). Last edit at 01/25/2023 01:48AM by zxzy_eng.
Sorry, only registered users may post in this forum.