Velleman K8200 Erfahrungen/Baubericht
geschrieben von Mirco S.
|
Re: Velleman K8200 Erfahrungen/Baubericht 01. February 2016 06:25 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 51 |
Hallo zusammen,
ich bin gerade über den folgenden Umbau gestolpert und bin am überlegen ob ich meinen K8200 umbaue:
[www.thingiverse.com]
Bereits umgebaut:
[www.thingiverse.com]
[www.thingiverse.com]
Vorteile die ich sehe:
- größerer Bauraum
- weniger bewegte Masse
- stabilere Z-Achse
Was meint Ihr zu dieser Lösung?
ich bin gerade über den folgenden Umbau gestolpert und bin am überlegen ob ich meinen K8200 umbaue:
[www.thingiverse.com]
Bereits umgebaut:
[www.thingiverse.com]
[www.thingiverse.com]
Vorteile die ich sehe:
- größerer Bauraum
- weniger bewegte Masse
- stabilere Z-Achse
Was meint Ihr zu dieser Lösung?
|
Re: Velleman K8200 Erfahrungen/Baubericht 01. February 2016 08:02 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 640 |
Hi Daniel,
ganz nett, aber ich persönlich sehe den Aufwand gegenüber dem Vorteil nicht gerechtfertigt. Rein vom Thema bewegte Masse: Je höher der Druck desto größer werden die Drehmomente an den Verbindungen der Z-Führung zum Rahmen. Heisst, wenn man weiter oben druckt, wird das hin und her des Kopfs sich stark auf den Aufbau auswirken und man hat sich sehr wahrscheinlich nicht viel gespart. Ob die Z-Achse hierdurch stabiler wird wage ich deshalb zu bezweifeln. Auch nicht zu vergessen, daß der Z-Motor noch mehr Last heben muß. Den einzigen Vorteil sehe ich in der Bauraumvergrößerung falls man diese wirklich benötigt.
Wenn man sich den Vorteil eines bewegten Druckkopfs zu nutzen machen möchte, rate ich gleich auf einen CORE-XY zu gehen, was aber leider zu einem fundamentalen Umbau des K8200 führen würde oder gleich einem Neubau. Hier bleibt aber die Druckplatte stehen (zumindest X und Y) und der komplette Kopf überträgt Kräfte und Momente innerhalb eines stabilen Rahmens -> hier kann man richtig hohes Tempo auf die Platte bringen.
Gruss Don
ganz nett, aber ich persönlich sehe den Aufwand gegenüber dem Vorteil nicht gerechtfertigt. Rein vom Thema bewegte Masse: Je höher der Druck desto größer werden die Drehmomente an den Verbindungen der Z-Führung zum Rahmen. Heisst, wenn man weiter oben druckt, wird das hin und her des Kopfs sich stark auf den Aufbau auswirken und man hat sich sehr wahrscheinlich nicht viel gespart. Ob die Z-Achse hierdurch stabiler wird wage ich deshalb zu bezweifeln. Auch nicht zu vergessen, daß der Z-Motor noch mehr Last heben muß. Den einzigen Vorteil sehe ich in der Bauraumvergrößerung falls man diese wirklich benötigt.
Wenn man sich den Vorteil eines bewegten Druckkopfs zu nutzen machen möchte, rate ich gleich auf einen CORE-XY zu gehen, was aber leider zu einem fundamentalen Umbau des K8200 führen würde oder gleich einem Neubau. Hier bleibt aber die Druckplatte stehen (zumindest X und Y) und der komplette Kopf überträgt Kräfte und Momente innerhalb eines stabilen Rahmens -> hier kann man richtig hohes Tempo auf die Platte bringen.
Gruss Don
|
Re: Velleman K8200 Erfahrungen/Baubericht 01. February 2016 11:35 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 29 |
Hallo,
Ja, so sehe ich dass auch. Was ggf. besser wäre den aktuellen x-y Schlitten als Core XY zu führen. Das spart das Gewicht eines Motors - ca. 300G.
Grüße
Industrial_Spiderman
Umgesetzt:
- 2 Z-Achsen mit TR10-2 und zusätzlich Z-Wobblekompensator (Linearlager) (Eigenkonstruktion)
- X & Y und Z Achse mit 0.9 Schrittmotoren,
- Arduino Due + RADDS mit Marlin 2.0.x
- SilentStepStick TMC 2130 Treiber auf X, Y, Z und E (X, Y 64 Mikroschritte und 256x interpoliert) = 1285 Schritte/mm und Extruder(64 Mikroschritte und 256x interpoliert) = 2300 Schritte/mm)
- Igus Gleitlager für X und Y Achsen - Lagerspiel einstellbar,
- X & Y-Achse auf 10mm beschichtete Aluminium Stange,
- Alu Wellenhalter für X-Achse
- Autobedleveling mit induktivem Näherungsschalter,
- Stärkeres (150W) 15V Netzteil, separates 24V Netzteil für Bett,
- laterale Verstärkung/Abstützung des Z-Achsenrahmens durch zusätzliche Profile & Schlitten mit L-Profilen verstärkt,
- Octoprint auf R-Pi mit USV für geordnetes Herunterfahren,
- Extruder auf GT2 Riemen umgerüstet
- MK3 Heizbett
- Energieketten
- E3D mit 40mm Lüfter,
- Neue Hot-End Aufnahme (Eigenkonstruktion) mit Teilelüfter
- Schaltung des Controller Lüfter und Extruder Lüfter über den Controller
- Filamentsensor am Raspi - Octoprint - Pause (Plugin)
- RGB Beleuchtung / Statusanzeige über Octoprint gesteuert.
- Weitere neu konstruierte Teile in Thingiverse unter "rudyard_kipling"
- Automatisches Abschalten des Druckers nach Abschluss des Drucks mittles FHEM und Intertechno Zwischenstecker
Noch in Arbeit:
- Full Graphic Controller Screen - will ich noch hinzufügen, da ich jetzt die pins frei habe.
Zukunft:
- CoreXY Umbau (reduziert das Gewicht am Schlitten um ca. 370g)
- Filamendickenmessung - optisch
Ja, so sehe ich dass auch. Was ggf. besser wäre den aktuellen x-y Schlitten als Core XY zu führen. Das spart das Gewicht eines Motors - ca. 300G.
Grüße
Industrial_Spiderman
Umgesetzt:
- 2 Z-Achsen mit TR10-2 und zusätzlich Z-Wobblekompensator (Linearlager) (Eigenkonstruktion)
- X & Y und Z Achse mit 0.9 Schrittmotoren,
- Arduino Due + RADDS mit Marlin 2.0.x
- SilentStepStick TMC 2130 Treiber auf X, Y, Z und E (X, Y 64 Mikroschritte und 256x interpoliert) = 1285 Schritte/mm und Extruder(64 Mikroschritte und 256x interpoliert) = 2300 Schritte/mm)
- Igus Gleitlager für X und Y Achsen - Lagerspiel einstellbar,
- X & Y-Achse auf 10mm beschichtete Aluminium Stange,
- Alu Wellenhalter für X-Achse
- Autobedleveling mit induktivem Näherungsschalter,
- Stärkeres (150W) 15V Netzteil, separates 24V Netzteil für Bett,
- laterale Verstärkung/Abstützung des Z-Achsenrahmens durch zusätzliche Profile & Schlitten mit L-Profilen verstärkt,
- Octoprint auf R-Pi mit USV für geordnetes Herunterfahren,
- Extruder auf GT2 Riemen umgerüstet
- MK3 Heizbett
- Energieketten
- E3D mit 40mm Lüfter,
- Neue Hot-End Aufnahme (Eigenkonstruktion) mit Teilelüfter
- Schaltung des Controller Lüfter und Extruder Lüfter über den Controller
- Filamentsensor am Raspi - Octoprint - Pause (Plugin)
- RGB Beleuchtung / Statusanzeige über Octoprint gesteuert.
- Weitere neu konstruierte Teile in Thingiverse unter "rudyard_kipling"
- Automatisches Abschalten des Druckers nach Abschluss des Drucks mittles FHEM und Intertechno Zwischenstecker
Noch in Arbeit:
- Full Graphic Controller Screen - will ich noch hinzufügen, da ich jetzt die pins frei habe.
Zukunft:
- CoreXY Umbau (reduziert das Gewicht am Schlitten um ca. 370g)
- Filamendickenmessung - optisch
|
Re: Velleman K8200 Erfahrungen/Baubericht 01. February 2016 13:05 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 113 |
Also 300gr. spart man nicht wenn man sich die so geläufigen Teile ausdruckt in stabil. Nach meiner Rechnung sind es ca. 50gr die man gesamt spart.
Ein Seitenteil mit Lagern, Schrauben etc wiegt über 100gr! habe den Umbausatz komplett hier liegen. Aber bei der Ersparniss ist mir der Aufwand zugroß.
Da müssten neue teile her mit mehr Taschen oder filigran aus Aluminium wäre wohl am besten. Oder die Y-Platte neu machen mit gekanteten Aufnahmen für die Lager.
Ein Seitenteil mit Lagern, Schrauben etc wiegt über 100gr! habe den Umbausatz komplett hier liegen. Aber bei der Ersparniss ist mir der Aufwand zugroß.
Da müssten neue teile her mit mehr Taschen oder filigran aus Aluminium wäre wohl am besten. Oder die Y-Platte neu machen mit gekanteten Aufnahmen für die Lager.
|
Re: Velleman K8200 Erfahrungen/Baubericht 01. February 2016 15:36 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
Hallo,
das Konzept entspricht wohl ziemlich der Logik eines Prusa i3.
Ich habe meinen Eigenbau nach einem sehr ähnlichen System aufgebaut (siehe meine Webseite unter OliCube MK2).
Da habe ich X=330, Y=290, Z=330.
Das funktioniert zwar recht gut, aber die Genauigkeit beim Layeraufbau ist bei meinem K8200 (einseitig Kugelumlauf; auf der anderen Seite 2. Kugelbüchse)
wohl etwas genauer bzw. die Layerlagen liegen genauer aufeinander. Ich habe beobachtet, dass das Gewicht von Extruder mit Motor usw. den Druckkopf in
der Mitte der Platte näher an das Druckbett bringt als am Rand. D. h. der Kopf hängt in der Mitte etwas an den Stangen vom Gewicht durch.
Gerade auf die Strecke von 300mm oder größer. Ist zwar nur 1-2/10mm, aber durchaus spürbar beim Druck.
Dieser Sache könnte man wahrscheinlich entgegen wirken, wenn man auf einen Bowden-Extruder umsteigt um das Gewicht von der X-Achse runter zu bringen.
Ich bin zwar relativ gesehen zufrieden mit dem Ausdruck meines großen Eigenbau-Druckers, aber auch dieses Gerät hat Vor- und Nachteile.
Also ich würde meinen K8200 nach diesem Prinzip nicht umbauen. Der Druckbereich wird zwar größer, aber das Druckergebnis wird wahrscheinlich etwas schlechter wie das auch schon
Donboy geschrieben hat. Gerade wenn es in die Höhe geht, wird es wahrscheinlich durch die Vibrationen etwas ungenauer. Dieses Probleme habe ich an meinem Gerät zwar nicht, da ich ja einen kompletten Rahmen habe, aber beim Umbau könnte das ein Problem sein.
Um das zu testen würde ich mir eher einen kleinen Rahmen selbst basteln und die einzelnen Anbauteile dort anbauen und meinen K8200 lassen wie er ist.
Gruß
Oliver
2-mal bearbeitet. Zuletzt am 01.02.16 15:41.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
das Konzept entspricht wohl ziemlich der Logik eines Prusa i3.
Ich habe meinen Eigenbau nach einem sehr ähnlichen System aufgebaut (siehe meine Webseite unter OliCube MK2).
Da habe ich X=330, Y=290, Z=330.
Das funktioniert zwar recht gut, aber die Genauigkeit beim Layeraufbau ist bei meinem K8200 (einseitig Kugelumlauf; auf der anderen Seite 2. Kugelbüchse)
wohl etwas genauer bzw. die Layerlagen liegen genauer aufeinander. Ich habe beobachtet, dass das Gewicht von Extruder mit Motor usw. den Druckkopf in
der Mitte der Platte näher an das Druckbett bringt als am Rand. D. h. der Kopf hängt in der Mitte etwas an den Stangen vom Gewicht durch.
Gerade auf die Strecke von 300mm oder größer. Ist zwar nur 1-2/10mm, aber durchaus spürbar beim Druck.
Dieser Sache könnte man wahrscheinlich entgegen wirken, wenn man auf einen Bowden-Extruder umsteigt um das Gewicht von der X-Achse runter zu bringen.
Ich bin zwar relativ gesehen zufrieden mit dem Ausdruck meines großen Eigenbau-Druckers, aber auch dieses Gerät hat Vor- und Nachteile.
Also ich würde meinen K8200 nach diesem Prinzip nicht umbauen. Der Druckbereich wird zwar größer, aber das Druckergebnis wird wahrscheinlich etwas schlechter wie das auch schon
Donboy geschrieben hat. Gerade wenn es in die Höhe geht, wird es wahrscheinlich durch die Vibrationen etwas ungenauer. Dieses Probleme habe ich an meinem Gerät zwar nicht, da ich ja einen kompletten Rahmen habe, aber beim Umbau könnte das ein Problem sein.
Um das zu testen würde ich mir eher einen kleinen Rahmen selbst basteln und die einzelnen Anbauteile dort anbauen und meinen K8200 lassen wie er ist.
Gruß
Oliver
2-mal bearbeitet. Zuletzt am 01.02.16 15:41.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
|
Re: Velleman K8200 Erfahrungen/Baubericht 04. February 2016 08:45 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 146 |
Wer kann mir helfen? ich möchte das sich das Netzteil bei Druckende ausschaltet. Ich habe nicht die Vellemannsteuerung sondern Ramps 1.4 wie Rebeca mit dem 2560 Board.
Am Netzteil ist PS-ON vorhanden das ich bis jetzt einfach gebrückt habe, es müsste aber doch möglich sein das über einen Pin von Board zu machen, nur ich weis nicht wie das gehen könnte, ich bin halt kein Softwarefreak.
Zum Umbau der Y-Achse denke ich ähnlich, das Gewicht des dort fehlende Motors wird duch die neuen Teile fast aufgehoben.
Bei mir hat der Umbau der Z-Achse eine wesentliche Verbesserung gebracht, der alte einseitige Antrieb liss den Arm doch mehr oder weniger duchhängen. Ich habe bei Richtungswechseln in beiden Richtungen mehrere Zehntel Totweg gemessen der nun durch den zweiten Antrieb fort ist.
Was mich im Moment noch ärgert ist das die X-Achse manchmal Versatz hat. Es knagt etwas und die nächste Bahn liegt fast 1 mm daneben, warum habe ich noch nicht rausgefunden.
Die Tips hier habe ich schon fast alle probiert, ich werde jetzt mal mit Cura slicen um einen evtl. Fehler beim Slicen auszuschliesen. Wie gesagt der Fehler ist nicht bei jeden Teil das ich drucke, ein Testobjekt vom 20mm X 20 mm X 200mm geht ohne Probleme und beim 40 mm hohen Gehäuse springt die Achse.
Velleman 8200. Arduino Mega2560, Ramps v1.4 mit RepRapdiscount Full GraphicDisplay, MK2B, 1,75 mm Direcktextruder (China), Optische Endstops für Min und Max, 2X16A 12V Netzteil, Doppelkühlung mit Luftführung, 2 Z-Achse mit Motor wie andere Seite und demnächst Leveling.
Am Netzteil ist PS-ON vorhanden das ich bis jetzt einfach gebrückt habe, es müsste aber doch möglich sein das über einen Pin von Board zu machen, nur ich weis nicht wie das gehen könnte, ich bin halt kein Softwarefreak.
Zum Umbau der Y-Achse denke ich ähnlich, das Gewicht des dort fehlende Motors wird duch die neuen Teile fast aufgehoben.
Bei mir hat der Umbau der Z-Achse eine wesentliche Verbesserung gebracht, der alte einseitige Antrieb liss den Arm doch mehr oder weniger duchhängen. Ich habe bei Richtungswechseln in beiden Richtungen mehrere Zehntel Totweg gemessen der nun durch den zweiten Antrieb fort ist.
Was mich im Moment noch ärgert ist das die X-Achse manchmal Versatz hat. Es knagt etwas und die nächste Bahn liegt fast 1 mm daneben, warum habe ich noch nicht rausgefunden.
Die Tips hier habe ich schon fast alle probiert, ich werde jetzt mal mit Cura slicen um einen evtl. Fehler beim Slicen auszuschliesen. Wie gesagt der Fehler ist nicht bei jeden Teil das ich drucke, ein Testobjekt vom 20mm X 20 mm X 200mm geht ohne Probleme und beim 40 mm hohen Gehäuse springt die Achse.
Velleman 8200. Arduino Mega2560, Ramps v1.4 mit RepRapdiscount Full GraphicDisplay, MK2B, 1,75 mm Direcktextruder (China), Optische Endstops für Min und Max, 2X16A 12V Netzteil, Doppelkühlung mit Luftführung, 2 Z-Achse mit Motor wie andere Seite und demnächst Leveling.
|
Re: Velleman K8200 Erfahrungen/Baubericht 04. February 2016 15:02 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
Hallo Harry,
im Forum gibt es eine Abhandlung wie man einen Pin rausführt.
[k8200-wiki.de]
Am Ramps kann man sicherlich noch besser einen Pin vom Arduino-Mega-Board abgreifen.
Um den I/O-Pin zu schalten findest Du hier den GCode-Befehl:
[reprap.org]
Hier könnte man mit einer kleinen Schaltung (Relais-/MosFET-Schaltung, o. ä.) am Ende eines Druckvorganges aus dem Gcode
den Pin ansteuern, damit das Relais den PS_ON unterbricht. Es gibt Relais mit manueller Betätigung.
Ich stelle mir das so vor:
Relais brückt als Schließer PS_ON und der Drucker hat Strom.
Am Ende des Druckvorgangs wird über den Pin ein Signal geschickt und das Relais öffnet die Brücke von PS_ON und der Drucker
wird abgeschaltet. Um den Drucker wieder mit Strom zu versorgen wird die manuelle Betätigung des Relais als Schließer wieder betätigt.
oder
Ich lasse das Relais über einen Arduino-Micro laufen und der kleine Chip übernimmt nach Impus von der Boardlogik über den Pin
das Schalten des Relais und hält das Relais geöffnet. Nach Reset des Arduino schließt das Relais den Versorgungskontakt wieder.
Inzwischen gibt es auch Relais, die direkt mit 5V Direkt vom Controller aus betrieben werden können.
[www.ebay.de]
Heisst aber, dass der Arduino immer mit 5V beschaltet sein müsste.
Auch ein bistabiles Relais wäre da interessant. Da könnte man dann noch am Arduino 2 Taster anschließen um manuell die Versorgungsspannung zu- oder abzuschalten.
Dann würde der Impuls vom Pin das Relais in den Öffner zustand bringen und das Gerät und das Netzteil wären stromlos. Anschließend drückt man am Arduino einen
Taster, der dann das Relais wird stabil als Schließer betätigt und der Drucker ist wieder betriebsbereit.
Allerdings würde ich das (ab)schalten von 230V direkt am Netzteil in jedem Fall einem Profi überlassen.
Das Schalten hinter den 15V vom Netzteil würde zwar eine Trennung des Druckers vom Strom bedeuten, aber am Netzteil würden immernoch 230V anliegen.
Ich habe die Sache noch nicht wirklich durch- bzw. zuende gedacht. Aber ich wollte mir mal einen Lüfter so steuern, der das Hotend kühlt.
Allerdings soll das Ding nicht die ganze Zeit laufen und am Ende des Drucks soll auch der Lüfter ausgehen. Das könnte man dann für den Hotend-Kühlungslüfter
und den Lüfter der bei mir die Steppertreiber kühlt parallel machen. Wie gesagt ist das alles nur so eine wirre Idee von mir. Mal sehen, ob ich das irgendwann mal
in Angriff nehme.
Bzgl. Z-Achse habe ich auch nur die einseitige Aufhängung, aber auf der rechten Seite noch eine 2. Kugelbüchse. Dadurch wurde die Achse stabiler und läuft links und
rechts schön parallel. Wollte auch erst auf einen 2. Motor für Z oder Antrieb über Riemen vom 1. Motor antreiben. Bin aber mit dem Ergebnis so zufrieden, dass ich das
dann doch nicht gemacht habe.
Bzgl. dem Versatz, wollte ich Dir was mitteilen, was mir passiert ist:
Ich hatte auch einen Layerversatz mit knacken und allem drum und dran. Daraufhin habe ich die Lager im Tisch für X gewechselt und das Umlenklager vom Riemen.
Nichts war. Zu guter letzt hatte ich festgestellt, dass die Welle vom Stepper gebrochen war. Das Ding konnte man von Hand wunderbar betätigen.
Erst nach dem Zerlegen des Motors habe ich festgestellt, dass kurz hinter dem Lager die Welle gebrochen war. Konnte man von Außen nicht sehen.
Durch die Spannung des Riemens (hatte ich vielleicht auch zu stark gespannt?!) wurde die Welle permanent bei den Umdrehungen "gewalkt" und ist
wohl gebrochen (War ein sauberer, netter Bruch!). Neuer Stepper rein und alles war wieder wie geschleckt!
Vielleicht mal in dieser Richtung den Fehler suchen. (Deine Aussage bzgl. dem "Knack" würde sich mit meinem damaligen Fehlerbild decken!)
Viele Grüße und viel Erfolg
Oliver
2-mal bearbeitet. Zuletzt am 04.02.16 15:06.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
im Forum gibt es eine Abhandlung wie man einen Pin rausführt.
[k8200-wiki.de]
Am Ramps kann man sicherlich noch besser einen Pin vom Arduino-Mega-Board abgreifen.
Um den I/O-Pin zu schalten findest Du hier den GCode-Befehl:
[reprap.org]
Hier könnte man mit einer kleinen Schaltung (Relais-/MosFET-Schaltung, o. ä.) am Ende eines Druckvorganges aus dem Gcode
den Pin ansteuern, damit das Relais den PS_ON unterbricht. Es gibt Relais mit manueller Betätigung.
Ich stelle mir das so vor:
Relais brückt als Schließer PS_ON und der Drucker hat Strom.
Am Ende des Druckvorgangs wird über den Pin ein Signal geschickt und das Relais öffnet die Brücke von PS_ON und der Drucker
wird abgeschaltet. Um den Drucker wieder mit Strom zu versorgen wird die manuelle Betätigung des Relais als Schließer wieder betätigt.
oder
Ich lasse das Relais über einen Arduino-Micro laufen und der kleine Chip übernimmt nach Impus von der Boardlogik über den Pin
das Schalten des Relais und hält das Relais geöffnet. Nach Reset des Arduino schließt das Relais den Versorgungskontakt wieder.
Inzwischen gibt es auch Relais, die direkt mit 5V Direkt vom Controller aus betrieben werden können.
[www.ebay.de]
Heisst aber, dass der Arduino immer mit 5V beschaltet sein müsste.
Auch ein bistabiles Relais wäre da interessant. Da könnte man dann noch am Arduino 2 Taster anschließen um manuell die Versorgungsspannung zu- oder abzuschalten.
Dann würde der Impuls vom Pin das Relais in den Öffner zustand bringen und das Gerät und das Netzteil wären stromlos. Anschließend drückt man am Arduino einen
Taster, der dann das Relais wird stabil als Schließer betätigt und der Drucker ist wieder betriebsbereit.
Allerdings würde ich das (ab)schalten von 230V direkt am Netzteil in jedem Fall einem Profi überlassen.
Das Schalten hinter den 15V vom Netzteil würde zwar eine Trennung des Druckers vom Strom bedeuten, aber am Netzteil würden immernoch 230V anliegen.
Ich habe die Sache noch nicht wirklich durch- bzw. zuende gedacht. Aber ich wollte mir mal einen Lüfter so steuern, der das Hotend kühlt.
Allerdings soll das Ding nicht die ganze Zeit laufen und am Ende des Drucks soll auch der Lüfter ausgehen. Das könnte man dann für den Hotend-Kühlungslüfter
und den Lüfter der bei mir die Steppertreiber kühlt parallel machen. Wie gesagt ist das alles nur so eine wirre Idee von mir. Mal sehen, ob ich das irgendwann mal
in Angriff nehme.
Bzgl. Z-Achse habe ich auch nur die einseitige Aufhängung, aber auf der rechten Seite noch eine 2. Kugelbüchse. Dadurch wurde die Achse stabiler und läuft links und
rechts schön parallel. Wollte auch erst auf einen 2. Motor für Z oder Antrieb über Riemen vom 1. Motor antreiben. Bin aber mit dem Ergebnis so zufrieden, dass ich das
dann doch nicht gemacht habe.
Bzgl. dem Versatz, wollte ich Dir was mitteilen, was mir passiert ist:
Ich hatte auch einen Layerversatz mit knacken und allem drum und dran. Daraufhin habe ich die Lager im Tisch für X gewechselt und das Umlenklager vom Riemen.
Nichts war. Zu guter letzt hatte ich festgestellt, dass die Welle vom Stepper gebrochen war. Das Ding konnte man von Hand wunderbar betätigen.
Erst nach dem Zerlegen des Motors habe ich festgestellt, dass kurz hinter dem Lager die Welle gebrochen war. Konnte man von Außen nicht sehen.
Durch die Spannung des Riemens (hatte ich vielleicht auch zu stark gespannt?!) wurde die Welle permanent bei den Umdrehungen "gewalkt" und ist
wohl gebrochen (War ein sauberer, netter Bruch!). Neuer Stepper rein und alles war wieder wie geschleckt!
Vielleicht mal in dieser Richtung den Fehler suchen. (Deine Aussage bzgl. dem "Knack" würde sich mit meinem damaligen Fehlerbild decken!)
Viele Grüße und viel Erfolg
Oliver
2-mal bearbeitet. Zuletzt am 04.02.16 15:06.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
|
Re: Velleman K8200 Erfahrungen/Baubericht 04. February 2016 15:52 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 2.094 |
Das Ramps hat doch PS_ON Pins (in der Nähe vom Reset-Button, wenn ich mich recht erinnere). Der funktioniert einwandfrei um ein ATX Netzteil ein und auszuschalten. Das liefert jedenfalls genügend Standby Spannung um das Ramps und den Mega zu versorgen, damit man die Pins durchschlagen kann.
Edit: Mit M80/M81 kann man dann das Netzteil ein- und ausschalten.
1-mal bearbeitet. Zuletzt am 04.02.16 15:54.
--
Microsoft MVP in den Kategorien DirectX/XNA * Visual C++ * Visual Studio and Development Technologies seit 2011
Andere Projekte: FSR Board (ABL-Sensor-Platine inkl. Firmware) * ThirtyTwo (32Bit RepRap-Firmware)
Edit: Mit M80/M81 kann man dann das Netzteil ein- und ausschalten.
1-mal bearbeitet. Zuletzt am 04.02.16 15:54.
--
Microsoft MVP in den Kategorien DirectX/XNA * Visual C++ * Visual Studio and Development Technologies seit 2011
- Mein Erster (RAMPS 1.4, Selbstbau WolfStrap-Derivat mit Linearführungen, Wade Extruder und E3D lite6 Hotend)
- Cub44 (Selbstbau Dual Wire Gantry Derivat mit Zahnriemen und Linearschienen, RADDS 1.5 und DUE, Custom Hotend - E3D like, Compact Bowden Extruder)
- HexMax (sechseckiger Delta (eigenes Design) mit Druckraum 300mm Durchmesser und >=400mm Höhe, RADDS 1.5, 24V, Custom Hotend, Compact Bowden Extruder)
- P3Steel Toolson MK2 - Keine Zeit zum selbst planen ;-)
Andere Projekte: FSR Board (ABL-Sensor-Platine inkl. Firmware) * ThirtyTwo (32Bit RepRap-Firmware)
|
Re: Velleman K8200 Erfahrungen/Baubericht 04. February 2016 16:44 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 124 |
|
Re: Velleman K8200 Erfahrungen/Baubericht 05. February 2016 02:31 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 640 |
Hi Harry,
!!Wie Oliver schreibt: Wenn man nicht bewandert mit Elektroinstallationen/bauten 230VAC ist, sollte man den guten Rat annehmen und es jemanden mit Ahnung machen lassen. Es gibt genug Beispiele hier im Forum wie man sich selber ins Krankenhaus oder "tiefer" bringt, bzw. wie man seinen Drucker zu Altmetall schmilzt oder gleich das ganze Haus mit...das so nebenbei !!
!!
Falls Du nicht mit MOSFets rumlöten möchtest, nimmst Du Dir am besten fertige Relais-Schaltungen für die TTL Ansteuerung mittels ATMEL-Chip.
Hier:
Sauber mittels 230VAC 10A Relais, Optokoppler und mit TTL +5V - 15 mA Schaltaufwand zu betreiben für <3€. Einen Pin - GND, einen Pin - +5V, und die Steuerpins überbrückt an einen I/O Pin des Boards - FERTIG
Die Ansteuerung über die Software erfolgt über den Start-GCode bzw. End-GCode in der Druckersoftware. Entweder über M80/81 am PS_ON Pin oder Du wählst Dir einen freien Pin und steuerst "semimanuell" über den M42 Pxx. -> Hier eine kurzes Tutorial und hier das Pin-Mapping am MEGA
Viel Erfolg & Gruß Don
Nachdem der MEGA unter dem Ramps hängt, hast Du hardwaretechnisch den VOLLEN Zugriff auf alle Pins des Atmel-Chips - Das einzige ist die Steuerung der über deine Drucksoftware.Quote
Harry2006
Wer kann mir helfen? ich möchte das sich das Netzteil bei Druckende ausschaltet. Ich habe nicht die Vellemannsteuerung sondern Ramps 1.4 wie Rebeca mit dem 2560 Board.
!!Wie Oliver schreibt: Wenn man nicht bewandert mit Elektroinstallationen/bauten 230VAC ist, sollte man den guten Rat annehmen und es jemanden mit Ahnung machen lassen. Es gibt genug Beispiele hier im Forum wie man sich selber ins Krankenhaus oder "tiefer" bringt, bzw. wie man seinen Drucker zu Altmetall schmilzt oder gleich das ganze Haus mit...das so nebenbei
!!Falls Du nicht mit MOSFets rumlöten möchtest, nimmst Du Dir am besten fertige Relais-Schaltungen für die TTL Ansteuerung mittels ATMEL-Chip.
Hier:

Sauber mittels 230VAC 10A Relais, Optokoppler und mit TTL +5V - 15 mA Schaltaufwand zu betreiben für <3€. Einen Pin - GND, einen Pin - +5V, und die Steuerpins überbrückt an einen I/O Pin des Boards - FERTIG
Die Ansteuerung über die Software erfolgt über den Start-GCode bzw. End-GCode in der Druckersoftware. Entweder über M80/81 am PS_ON Pin oder Du wählst Dir einen freien Pin und steuerst "semimanuell" über den M42 Pxx. -> Hier eine kurzes Tutorial und hier das Pin-Mapping am MEGA
Schon mal meinen Vorschlag hier probiert ?Quote
Harry2006
Was mich im Moment noch ärgert ist das die X-Achse manchmal Versatz hat. Es knagt etwas und die nächste Bahn liegt fast 1 mm daneben, warum habe ich noch nicht rausgefunden.
Viel Erfolg & Gruß Don
|
Re: Velleman K8200 Erfahrungen/Baubericht 05. February 2016 03:00 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 640 |
Quote
samurai1967
Aber ich wollte mir mal einen Lüfter so steuern, der das Hotend kühlt. Allerdings soll das Ding nicht die ganze Zeit laufen und am Ende des Drucks soll auch der Lüfter ausgehen. ...
Was Du willst geht einfach, aber nur über die Marlin-Firmware indem Du die AUTO-FAN Funktion nutzt
Du fiundest in der ConfigurationAdv.h
--------------------------------- // Extruder cooling fans // Configure fan pin outputs to automatically turn on/off when the associated // extruder temperature is above/below EXTRUDER_AUTO_FAN_TEMPERATURE. // Multiple extruders can be assigned to the same pin in which case // the fan will turn on when any selected extruder is above the threshold. #define EXTRUDER_0_AUTO_FAN_PIN -1 #define EXTRUDER_1_AUTO_FAN_PIN -1 #define EXTRUDER_2_AUTO_FAN_PIN -1 #define EXTRUDER_AUTO_FAN_TEMPERATURE 50 #define EXTRUDER_AUTO_FAN_SPEED 255 // == full speed
Die Pins sind die hardwareseitig geschalteten Anschlüsse der bestehenden Lüfter. Du kannst bis zu 3 Lüfter gleichzeitig laufen lassen. Du kannst ja zusätzliche Lüfter ansteuern - Das einizge was Du brauchst ist eine Schaltstufe um die Motoren mit Ampere zu versorgen...das bastelst Du Dir 100% selber
. Ich hab so meinen Lüfter für den Kühlkörper des E3D ab einer Temp. von 50° im Betrieb. Das Schöne: ich kümmere mich garn nicht mehr darum ob der Head zu heiss oder kalt ist. Das Ding läuft bei T>50° - egal ob ich am Drucken oder im Standby bin
Evtl. mußt Du Dir die Default Pin-Config deaktivieren:
in pins.h
FAN_PIN -1aber ich weiß das nicht mehr genau und könnte heute Abend das schnell nochmal nachschauen
Greeze Don
|
Re: Velleman K8200 Erfahrungen/Baubericht 05. February 2016 03:54 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
@Donboy:
Danke für die Info.
Ganz verstanden habe ich das aber nicht.
Heisst das ich gebe in pins.h einen entsprechenden Pin an, den ich dann über eine Schaltstufe an den Lüfter bringe.
Anschließend regelt die Firmware die Kühlung selbst (bei z. B. über 50°C am Hotend).
Ich habe ja das originale Standard-Board (ähnl. Sanguinolu) am Drucker.
Bei Ramps (hast Du ja geschrieben) kommt man sicherlich einfacher an die einzelnen Pins.
Da ich ja die SD-Kartengeschichte nicht einsetze kann ich da auch was von der Stiftleiste sauber abgreifen bzw. Pins nutzen.
D. h. aber im Klartext für mich:
Ich brauche keine Logik zu programmieren (Arduino o. ä.) da das in der Firmware schon drin ist und nur aktiviert werden muss?!
Nochmals danke für die Info. Muss ich mir mal anschauen.
Gruß
Oli
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
Danke für die Info.
Ganz verstanden habe ich das aber nicht.
Heisst das ich gebe in pins.h einen entsprechenden Pin an, den ich dann über eine Schaltstufe an den Lüfter bringe.
Anschließend regelt die Firmware die Kühlung selbst (bei z. B. über 50°C am Hotend).
Ich habe ja das originale Standard-Board (ähnl. Sanguinolu) am Drucker.
Bei Ramps (hast Du ja geschrieben) kommt man sicherlich einfacher an die einzelnen Pins.
Da ich ja die SD-Kartengeschichte nicht einsetze kann ich da auch was von der Stiftleiste sauber abgreifen bzw. Pins nutzen.
D. h. aber im Klartext für mich:
Ich brauche keine Logik zu programmieren (Arduino o. ä.) da das in der Firmware schon drin ist und nur aktiviert werden muss?!
Nochmals danke für die Info. Muss ich mir mal anschauen.
Gruß
Oli
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
|
Re: Velleman K8200 Erfahrungen/Baubericht 05. February 2016 04:47 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 640 |
Hi Oli,
das hast Du richtig verstanden! Keine Logik programmieren oder oder ähnliches Workaround drangelötet!
Du kannst über die Marlin-FW ja bis zu 3 Lüfter dranhängen. Am K8200 hängt (hardwaretechnisch) aber nur einer - (Ramps hat hier 2 vorgesehen).
Dazu mein Hinweis für die zusätzlichen Hardware :
- Du nimmst einen der freien Pins am freigeführten I/O Bereich des Controllers, oder falls dieser komplett besetzt (Display etc,) mußt Du einen direkt am Chip abgreifen.
- Hier hängt deine MOSFet-Schaltung um die Ströme des Lüfter-Motors zu schalten -> der Chip packt das nicht
- In der FW definierst Du den 2. Lüfter wie folgt: (z.B. Pin PC02 ->Pin#55 -> Arduino#:35) (*<-für alle die das hier nicht checken siehe unten)
in Configuration_adv.h
Du darfst nicht den Standard Lüfter (Pin 8) verwenden, da Du dann eine Fehlermeldung erhälst :#error "You cannot set EXTRUDER_0_AUTO_FAN_PIN equal to FAN_PIN" : Schau es Dir selber in der "temperature.cpp" ab Zeile 321 an.
Compile & Upload -> das wars ;-)
Ach ja: FAN_PIN -1 in der pins.h musst Du nur machen wenn du den Standard-Lüfter hierfür verwenden willst !
LG Don
(*) Bei den Controllern mit Atmel Chips gibt es 3 Notationen für eine und den selben Anschluß:

1-mal bearbeitet. Zuletzt am 05.02.16 04:51.
das hast Du richtig verstanden! Keine Logik programmieren oder oder ähnliches Workaround drangelötet!
Du kannst über die Marlin-FW ja bis zu 3 Lüfter dranhängen. Am K8200 hängt (hardwaretechnisch) aber nur einer - (Ramps hat hier 2 vorgesehen).
Dazu mein Hinweis für die zusätzlichen Hardware :
- Du nimmst einen der freien Pins am freigeführten I/O Bereich des Controllers, oder falls dieser komplett besetzt (Display etc,) mußt Du einen direkt am Chip abgreifen.
- Hier hängt deine MOSFet-Schaltung um die Ströme des Lüfter-Motors zu schalten -> der Chip packt das nicht
- In der FW definierst Du den 2. Lüfter wie folgt: (z.B. Pin PC02 ->Pin#55 -> Arduino#:35) (*<-für alle die das hier nicht checken siehe unten)
in Configuration_adv.h
#define EXTRUDER_0_AUTO_FAN_PIN 35 #define EXTRUDER_1_AUTO_FAN_PIN -1 #define EXTRUDER_2_AUTO_FAN_PIN -1 #define EXTRUDER_AUTO_FAN_TEMPERATURE 50 #define EXTRUDER_AUTO_FAN_SPEED 255 // == full speed
Du darfst nicht den Standard Lüfter (Pin 8) verwenden, da Du dann eine Fehlermeldung erhälst :#error "You cannot set EXTRUDER_0_AUTO_FAN_PIN equal to FAN_PIN" : Schau es Dir selber in der "temperature.cpp" ab Zeile 321 an.
Compile & Upload -> das wars ;-)
Ach ja: FAN_PIN -1 in der pins.h musst Du nur machen wenn du den Standard-Lüfter hierfür verwenden willst !
LG Don
(*) Bei den Controllern mit Atmel Chips gibt es 3 Notationen für eine und den selben Anschluß:
- Atmel Pin: - [PC02] ist die Bezeichnung des Pins der in den Referenzen verwendet wird und in fast allen Layouts (Schaltbild) angewandt wird.
- phsikalische Pin: - [#55] ist die Nummer des "Beinchen" am Chip welches angelötet wird. Zählt man i.d.R. bei Chip immer von links-oben gegen den Uhrzeigersinn ab.
- Arduion Pin: -[35] ist die Pinnummer welche in der Software angesteuert wird. Das ist im Arduino-Compiler verankert
1-mal bearbeitet. Zuletzt am 05.02.16 04:51.
|
Re: Velleman K8200 Erfahrungen/Baubericht 05. February 2016 05:56 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
Hallo Donboy,
und nochmals Danke für die wirklich verständliche und ausführliche Info.
Das mit der LED hatte ich anfangs schonmal probiert. Da ich ja keine Display oder Cardreader nutze, kann ich ja dann einige Pins nutzen
und bequem per Steckerleiste (hatte ich gleich am Anfang einglötet (man weiß ja nie ;-))) abgreifen bzw. dann über die Marlin-Firmware
für die Hotend-Kühlung steuern lassen.
Das mit dem MosFET ist (mir) soweit klar; die Controller-Ausgänge vertragen ja wirklich kaum Last.
Für eine andere Bastelei (Drehteller für 3D-Scan) hatte ich einen Arduino-Micro mit einer kleinen MosFET-Schaltung angeschlossen
um damit dann einen Motor zu drehen. Ist recht witzig. Ich hatte noch einen Taster, 2 Potis und einen Fototransistor drangehangen.
An Poti1 kann ich die Dauer des Drehimpulses einstellen (Motor = gehackter Modellbauservo = nun Minigetriebemotor).
An Poti2 kann ich die Empfindlichkeit des Fototransistors einstellen.
Nun kann ich mit dem Taster manuell den Drehimpuls auslösen.
Oder ich schalte am Handy den Blitz ein und der Blitzimpuls löst nach einer kleine Verzögerung (Bildaufnahme) den Drehimpuls aus.
Anschließend kann man die Bilder an einen kostenlosen Dienst von Autodesk schicken und die bastlen dann draus ein 3D-Modell.
Das Ergebnis war soweit ok. Habe das Ganze aber nur 1-2 Mal am Laufen gehabt und nun steht das Ding im Regal.
(Drehteller, etc. habe ich natürlich schön mit OpenSCAD gebastelt und mit meinem K8200-Schätzchen gedruckt.)
Also herzlichen Dank für die super Erklärung. Das dürfte auch ein paar anderen Leuten hier im Forum recht hilfreich sein.
Gruß
Oliver
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
und nochmals Danke für die wirklich verständliche und ausführliche Info.
Das mit der LED hatte ich anfangs schonmal probiert. Da ich ja keine Display oder Cardreader nutze, kann ich ja dann einige Pins nutzen
und bequem per Steckerleiste (hatte ich gleich am Anfang einglötet (man weiß ja nie ;-))) abgreifen bzw. dann über die Marlin-Firmware
für die Hotend-Kühlung steuern lassen.
Das mit dem MosFET ist (mir) soweit klar; die Controller-Ausgänge vertragen ja wirklich kaum Last.
Für eine andere Bastelei (Drehteller für 3D-Scan) hatte ich einen Arduino-Micro mit einer kleinen MosFET-Schaltung angeschlossen
um damit dann einen Motor zu drehen. Ist recht witzig. Ich hatte noch einen Taster, 2 Potis und einen Fototransistor drangehangen.
An Poti1 kann ich die Dauer des Drehimpulses einstellen (Motor = gehackter Modellbauservo = nun Minigetriebemotor).
An Poti2 kann ich die Empfindlichkeit des Fototransistors einstellen.
Nun kann ich mit dem Taster manuell den Drehimpuls auslösen.
Oder ich schalte am Handy den Blitz ein und der Blitzimpuls löst nach einer kleine Verzögerung (Bildaufnahme) den Drehimpuls aus.
Anschließend kann man die Bilder an einen kostenlosen Dienst von Autodesk schicken und die bastlen dann draus ein 3D-Modell.
Das Ergebnis war soweit ok. Habe das Ganze aber nur 1-2 Mal am Laufen gehabt und nun steht das Ding im Regal.
(Drehteller, etc. habe ich natürlich schön mit OpenSCAD gebastelt und mit meinem K8200-Schätzchen gedruckt.)
Also herzlichen Dank für die super Erklärung. Das dürfte auch ein paar anderen Leuten hier im Forum recht hilfreich sein.
Gruß
Oliver
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
|
Re: Velleman K8200 Erfahrungen/Baubericht 05. February 2016 06:52 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 640 |
|
Re: Velleman K8200 Erfahrungen/Baubericht 05. February 2016 07:28 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
@Donboy:
Absolut cool. Da bin ich mit meinen Basteleien noch ein absoluter Waisenknabe.
Gruß
Oli
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
Absolut cool. Da bin ich mit meinen Basteleien noch ein absoluter Waisenknabe.
Gruß
Oli
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 08:41 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
Hallo Gemeinde,
bin schon seit Jahren stiller Mitleser und will mich jetzt auch outen.
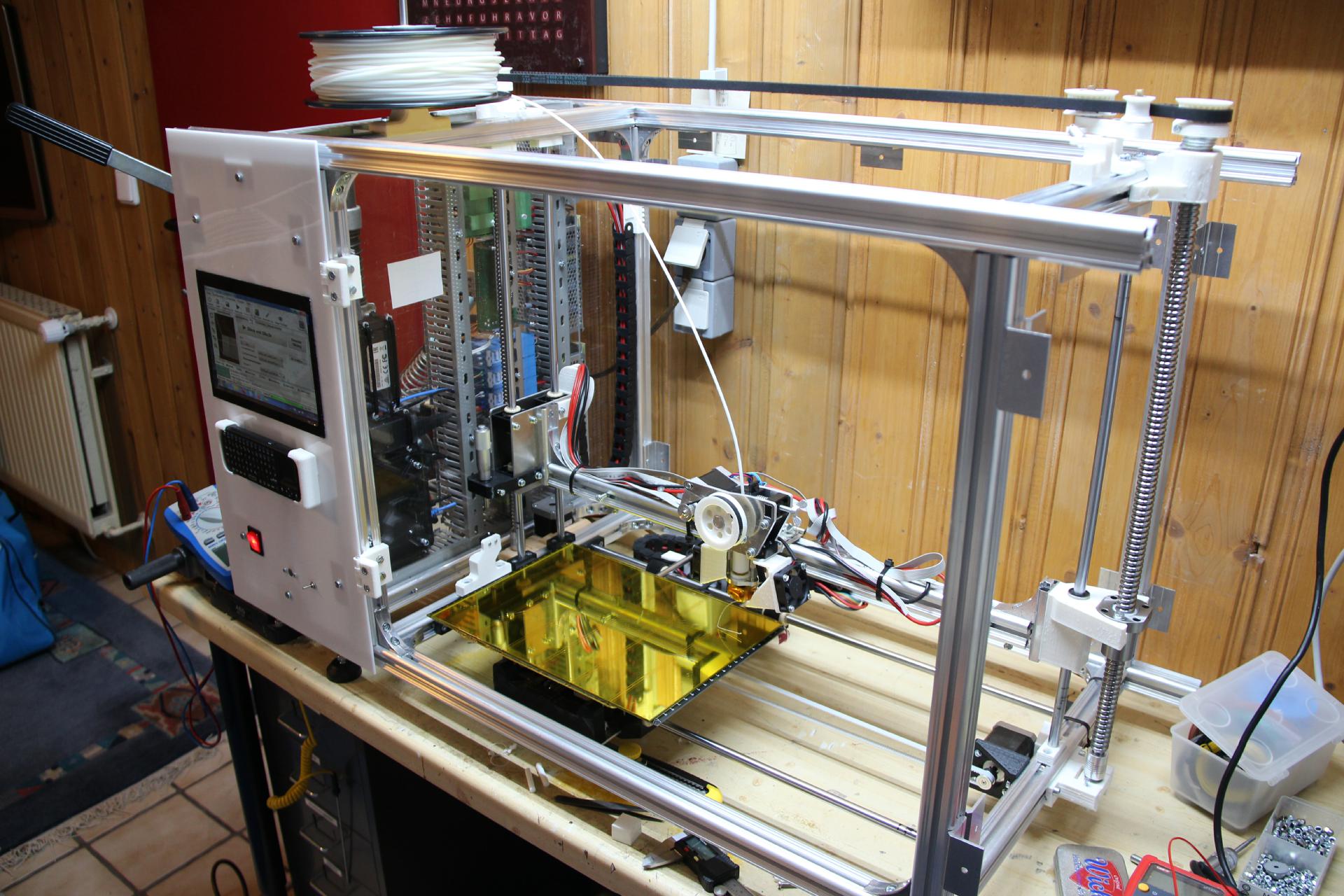
Habe soeben meinen modifizierten zweiten K8200 (Druckbereich 300x200x300, Bild druck1) fast fertiggestellt.
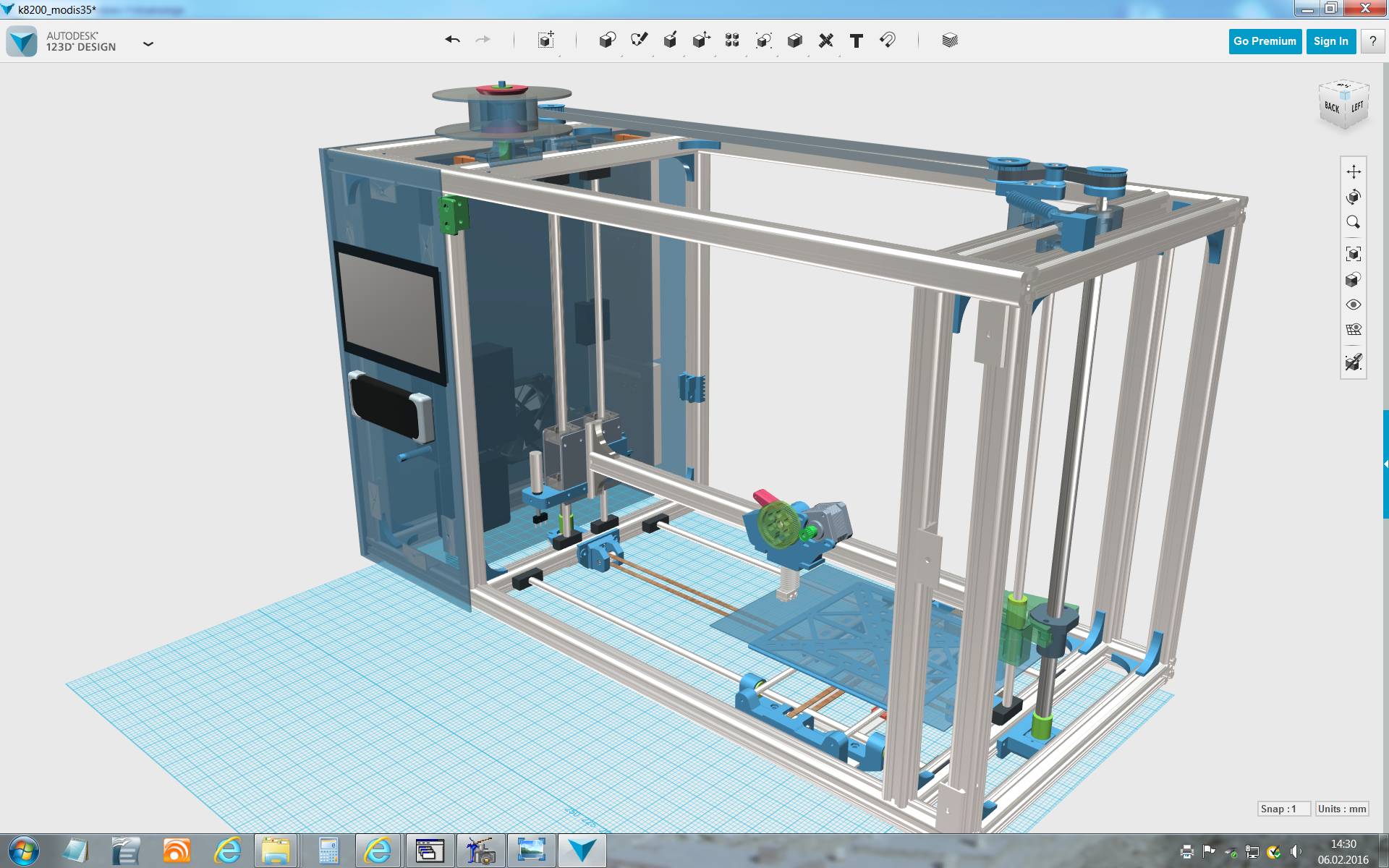
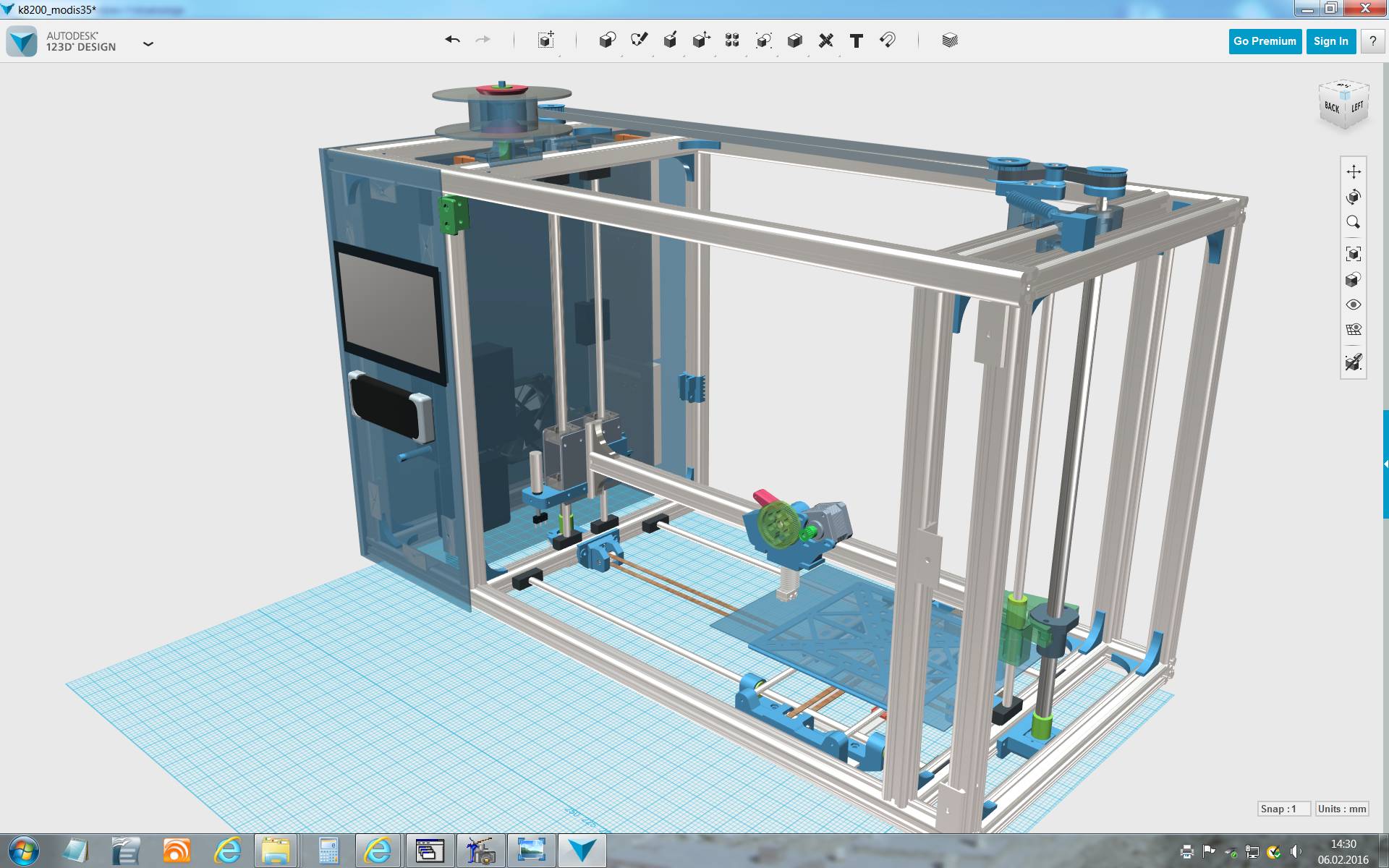
Die Z-Achse ist mit 2 Spindeln über einen großen T5-Riemen verbunden, und aufgrund des etwas höheren Kraftaufwands habe ich einen zusätzlichen Riemenantrieb (Bild druck2) eingefügt.
Den Abgleich in Marlin habe ich dann empirisch ermittelt.
Mit meinen Probedrücken bin ich erstmal zufrieden, jedoch habe ich ein Problem mit der tatsächlichen Druckhöhe.
Ein Probestück mit 20mm Höhe wird am Ende nur ca. 17mm hoch und dies wird bei größeren Teilen proportional mehr.
Das merkwürdige daran ist, dass wenn ich die Z-Achse im Handbetrieb fahre, die Höhendistanzen absolut genau sind. Nur beim eigentlichen Drucken passt es dann nicht, die Oberfläche auf der Z-Achse ist aber top (im Gegensatz zum alten K8200 mit Gewindestange)!
Es scheint, als ob regelmäßig Schritte verloren gehen würden. Als Driver habe ich die DRV8825 eingebaut.
Hat jemand eine Idee?
Gruß
Stefan
P.S. Habe sämtliche Planung mit 123D Design (Autodesk) durchgeführt. Wer Interesse an Dateien oder weitere Bilder hat, nur melden!
bin schon seit Jahren stiller Mitleser und will mich jetzt auch outen.
Habe soeben meinen modifizierten zweiten K8200 (Druckbereich 300x200x300, Bild druck1) fast fertiggestellt.
Die Z-Achse ist mit 2 Spindeln über einen großen T5-Riemen verbunden, und aufgrund des etwas höheren Kraftaufwands habe ich einen zusätzlichen Riemenantrieb (Bild druck2) eingefügt.
Den Abgleich in Marlin habe ich dann empirisch ermittelt.
Mit meinen Probedrücken bin ich erstmal zufrieden, jedoch habe ich ein Problem mit der tatsächlichen Druckhöhe.
Ein Probestück mit 20mm Höhe wird am Ende nur ca. 17mm hoch und dies wird bei größeren Teilen proportional mehr.
Das merkwürdige daran ist, dass wenn ich die Z-Achse im Handbetrieb fahre, die Höhendistanzen absolut genau sind. Nur beim eigentlichen Drucken passt es dann nicht, die Oberfläche auf der Z-Achse ist aber top (im Gegensatz zum alten K8200 mit Gewindestange)!
Es scheint, als ob regelmäßig Schritte verloren gehen würden. Als Driver habe ich die DRV8825 eingebaut.
Hat jemand eine Idee?
Gruß
Stefan
P.S. Habe sämtliche Planung mit 123D Design (Autodesk) durchgeführt. Wer Interesse an Dateien oder weitere Bilder hat, nur melden!
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 09:00 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
Nachtrag:
Beim Schreiben des Beitrags zuvor ist mir eine Idee gekommen:
Bin mal 20mm mit 0.1mm Schritten in Handbetrieb gefahren und siehe da, die Verluste waren noch größer!
Am Ende war die Gesamthöhe nur noch ca. 10mm.
Das heißt bei jedem Start verliert der Treiber Schritte.
Dann fiel mir das Thema mit der Decay-Brücke ein und dies werde ich jetzt probieren.
Ich werde das Ergebnis berichten...
Gruß
Stefan
Beim Schreiben des Beitrags zuvor ist mir eine Idee gekommen:
Bin mal 20mm mit 0.1mm Schritten in Handbetrieb gefahren und siehe da, die Verluste waren noch größer!
Am Ende war die Gesamthöhe nur noch ca. 10mm.
Das heißt bei jedem Start verliert der Treiber Schritte.
Dann fiel mir das Thema mit der Decay-Brücke ein und dies werde ich jetzt probieren.
Ich werde das Ergebnis berichten...
Gruß
Stefan
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 10:54 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
Hallo Stefan,
erstmal ein "WOW". Was für eine Monstermaschine. Absolut Klasse.
Übrigens bietet der "Erfinder" vom K8200 (3DRag) auch in Kit an um unsere Schätzchen auf 400x200x200 umzubauen.
Ebenfalls monströs. Er läßt allerdings die generelle Druckbreite von 200mm und verlängert den Drucker in die Tiefe.
Auf den Bildern dort glaube ich auch zu erkennen, dass er dann Führungen der Y-Bewegung nun für X-Bewegung nimmt und
die neue Y-Bewegung die längeren Stangen bekommt.
Hier mal der Link:
[store.open-electronics.org]
Zu dem Höhenverlust von Dir:
Soweit ich weiss sind beim DRV8825 die Schritte/Microschritte anders.
Ich bin der Meinung, dass der Treiberbaustein 1/32 Schritte macht (original beim A4988 sind's glaub' ich 1/16).
D. h. man muss in der Firmware die Stepps wohl verdoppeln für Z.
Dann müsste es hinhauen.
Das würde sich auch mit Deiner Aussage 20mm geben bloss 10mm in real decken.
Hab noch was zum Thema gefunden: Hier wird auch das Einstellen der Microschritte erklärt.
[www.my-home-fab.de]
Auch bei der normalen K8200-Elektronik sind unter dem Treiber Jumper (oder zumindest die Löcher für Jumpereinbau)
um die Microschritte vom Treiber einzustellen. Aber statt den Baustein auf 1/16 Schritte einzustellen, würde ich das in der
Firmware reglen und die 1/32-Schritte entsprechend nutzen.
P.S.:
Ich merke schon, dass der Trend zum größeren Zweitdrucker geht ;-)
Siehe meinen OliCube MK2.
Beste Grüße
Oliver
1-mal bearbeitet. Zuletzt am 06.02.16 11:08.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
erstmal ein "WOW". Was für eine Monstermaschine. Absolut Klasse.
Übrigens bietet der "Erfinder" vom K8200 (3DRag) auch in Kit an um unsere Schätzchen auf 400x200x200 umzubauen.
Ebenfalls monströs. Er läßt allerdings die generelle Druckbreite von 200mm und verlängert den Drucker in die Tiefe.
Auf den Bildern dort glaube ich auch zu erkennen, dass er dann Führungen der Y-Bewegung nun für X-Bewegung nimmt und
die neue Y-Bewegung die längeren Stangen bekommt.
Hier mal der Link:
[store.open-electronics.org]
Zu dem Höhenverlust von Dir:
Soweit ich weiss sind beim DRV8825 die Schritte/Microschritte anders.
Ich bin der Meinung, dass der Treiberbaustein 1/32 Schritte macht (original beim A4988 sind's glaub' ich 1/16).
D. h. man muss in der Firmware die Stepps wohl verdoppeln für Z.
Dann müsste es hinhauen.
Das würde sich auch mit Deiner Aussage 20mm geben bloss 10mm in real decken.
Hab noch was zum Thema gefunden: Hier wird auch das Einstellen der Microschritte erklärt.
[www.my-home-fab.de]
Auch bei der normalen K8200-Elektronik sind unter dem Treiber Jumper (oder zumindest die Löcher für Jumpereinbau)
um die Microschritte vom Treiber einzustellen. Aber statt den Baustein auf 1/16 Schritte einzustellen, würde ich das in der
Firmware reglen und die 1/32-Schritte entsprechend nutzen.
P.S.:
Ich merke schon, dass der Trend zum größeren Zweitdrucker geht ;-)
Siehe meinen OliCube MK2.
Beste Grüße
Oliver
1-mal bearbeitet. Zuletzt am 06.02.16 11:08.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 11:27 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 11:37 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
Verdammt, wenn man versucht auf dem Handy zu tippen...
Also weiter im Text:
Ich habe nun alle meine vorhandenen Varianten der Pololus ausprobiert. Die originalen, die DRV8825, mit und ohne Decay-Brücke.
Alles das selbe Ergebnis.
Wenn ich im Handmodus 0,1mm Schritte fahre, kommt die Gesamthöhe nicht korrekt heraus.
Habe das ganze am Original-K8200 nachgemacht, und da passt es.
Ich vermute nun, dass das Übersetzungsverhältnis der Spindel zu gering ist und sich dies nicht mit der Schrittanzahl der Motoren verträgt.
Soll heißen, dass er für einen Höhenschritt von 0,1mm vielleicht 4,4 Schritte machen müsste, da er das nicht kann macht er nur 4.
Kann das sein?
Also weiter im Text:
Ich habe nun alle meine vorhandenen Varianten der Pololus ausprobiert. Die originalen, die DRV8825, mit und ohne Decay-Brücke.
Alles das selbe Ergebnis.
Wenn ich im Handmodus 0,1mm Schritte fahre, kommt die Gesamthöhe nicht korrekt heraus.
Habe das ganze am Original-K8200 nachgemacht, und da passt es.
Ich vermute nun, dass das Übersetzungsverhältnis der Spindel zu gering ist und sich dies nicht mit der Schrittanzahl der Motoren verträgt.
Soll heißen, dass er für einen Höhenschritt von 0,1mm vielleicht 4,4 Schritte machen müsste, da er das nicht kann macht er nur 4.
Kann das sein?
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 11:58 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
Nochmal ich,
habe gerade versucht das mathematisch anzugehen. Vielleicht habe ich ja einen Denkfehler:
Meine Spindel ist eine Standardspindel 1605. Bedeutet 5mm Steigung pro Umdrehung. Wenn ich 0,1 mm Steigung erreichen will, müsste ich 360°/50= 7,2° drehen.
Meine Riemenuntersetzung (aus Bild druck2 oben) hat genau 1:2, da 20 und 40 Zähne GT2-Pulleys verbaut. Somit muss der Motor das doppelte 14,4° drehen.
Der Motor hat 200 Schritte pro Umdrehung, also 1,8° Schritte.
Somit muss er 14,4° / 1,8° = 8 Schritte machen.
Dies ist ein gerades Ergebnis und sollte somit klappen. Tut's aber nicht!
Kann jemand helfen?
Gruß
Stefan
habe gerade versucht das mathematisch anzugehen. Vielleicht habe ich ja einen Denkfehler:
Meine Spindel ist eine Standardspindel 1605. Bedeutet 5mm Steigung pro Umdrehung. Wenn ich 0,1 mm Steigung erreichen will, müsste ich 360°/50= 7,2° drehen.
Meine Riemenuntersetzung (aus Bild druck2 oben) hat genau 1:2, da 20 und 40 Zähne GT2-Pulleys verbaut. Somit muss der Motor das doppelte 14,4° drehen.
Der Motor hat 200 Schritte pro Umdrehung, also 1,8° Schritte.
Somit muss er 14,4° / 1,8° = 8 Schritte machen.
Dies ist ein gerades Ergebnis und sollte somit klappen. Tut's aber nicht!
Kann jemand helfen?
Gruß
Stefan
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 12:04 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
By the way...
weiß jemand was man hier einstellen kann (Configuration.h)?
#define DEFAULT_MAX_ACCELERATION {1200,1200,100,10000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
Der Wert für die Z-Achse ist ziemlich niedrig.
Kann es vielleicht sein, dass ich dadurch beim Beschleunigen Schritte verliere?
weiß jemand was man hier einstellen kann (Configuration.h)?
#define DEFAULT_MAX_ACCELERATION {1200,1200,100,10000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for skeinforge 40+, for older versions raise them a lot.
Der Wert für die Z-Achse ist ziemlich niedrig.
Kann es vielleicht sein, dass ich dadurch beim Beschleunigen Schritte verliere?
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 12:20 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 4.977 |
Die Beschreibung ist falsch. Das ist kein Startwert sondern die maximale Beschleunigung einer Achse.
| Triffid Hunter's Calibration Guide | --> X <-- Drill for new Monitor | Most important Gcode. |
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 12:39 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
Hallo Stefan,
ich versuche da auch mal denktechnisch dahinter zu kommen.
1,8° x 200 Schritte = 1 Umdrehung/360° = 5mm Höhe bei 1605 Spindel.
200 Schritte = 5 = 1mm Höhe = 40 Schritte.
40 Schritte : 10 = 0,1mm Höhe = 4 Schritte.
Alles bei 1:1 Verhältnis.
Nun aber x2 wg. Motorübersetzung = 8 Schritte.
Und x2 wg. 1/32 Schritte statt 1/16 Schritte = 16 Schritte.
(Im Repetier-Host Spindelrechner verdoppelt sich der Schrittwert bei Änderung von 1/16 auf 1/32).
Bei M8-Standardspindel Steigung 1,25mm steht in der Firmware ja der Wert 2560.
Ich habe eine Spindel 1204 eingebaut und der Wert bei mir ist 800.
Seinerzeit hatte ich einfach mit einer TR16x4 gerechnet (der Durchmesser ist ja egal).
Und da kam der Wert 800 raus.
Bei einer 5mm Steigung komme ich dann auf einen Wert von 640.
und x2 wg. Motor = 1280 Stepps. (wohlgemerkt bei 1/16 Schritte!)
Bei 1/32 verdoppelt sich das im Spindelrechner nochmal.
Was hast Du bei Dir eingetragen?
1280 oder 2560.
Ist die Höhe die Dir fehlt das doppelte oder weniger?
Das Du beim Beschleunigen Schritte verlierst kann ich mir so nicht vorstellen.
Ich habe beim K8200 die Beschleunigung lt. Donboy runtergesetzt.
#define DEFAULT_MAX_ACCELERATION {9000,9000,100,10000}
#define DEFAULT_ACCELERATION 1000
#define DEFAULT_XYJERK 20
#define DEFAULT_MAX_ACCELERATION {2000,2000,100,10000}
#define DEFAULT_ACCELERATION 800
#define DEFAULT_XYJERK 15
Aber die 100 bei Z als maximale Beschleunigung ist geblieben.
Sorry, mehr kann ich dazu dann im Moment leider nicht beitragen.
(Bin auch nur Kaufmann und kein Techniker).
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
ich versuche da auch mal denktechnisch dahinter zu kommen.
1,8° x 200 Schritte = 1 Umdrehung/360° = 5mm Höhe bei 1605 Spindel.
200 Schritte = 5 = 1mm Höhe = 40 Schritte.
40 Schritte : 10 = 0,1mm Höhe = 4 Schritte.
Alles bei 1:1 Verhältnis.
Nun aber x2 wg. Motorübersetzung = 8 Schritte.
Und x2 wg. 1/32 Schritte statt 1/16 Schritte = 16 Schritte.
(Im Repetier-Host Spindelrechner verdoppelt sich der Schrittwert bei Änderung von 1/16 auf 1/32).
Bei M8-Standardspindel Steigung 1,25mm steht in der Firmware ja der Wert 2560.
Ich habe eine Spindel 1204 eingebaut und der Wert bei mir ist 800.
Seinerzeit hatte ich einfach mit einer TR16x4 gerechnet (der Durchmesser ist ja egal).
Und da kam der Wert 800 raus.
Bei einer 5mm Steigung komme ich dann auf einen Wert von 640.
und x2 wg. Motor = 1280 Stepps. (wohlgemerkt bei 1/16 Schritte!)
Bei 1/32 verdoppelt sich das im Spindelrechner nochmal.
Was hast Du bei Dir eingetragen?
1280 oder 2560.
Ist die Höhe die Dir fehlt das doppelte oder weniger?
Das Du beim Beschleunigen Schritte verlierst kann ich mir so nicht vorstellen.
Ich habe beim K8200 die Beschleunigung lt. Donboy runtergesetzt.
#define DEFAULT_MAX_ACCELERATION {9000,9000,100,10000}
#define DEFAULT_ACCELERATION 1000
#define DEFAULT_XYJERK 20
#define DEFAULT_MAX_ACCELERATION {2000,2000,100,10000}
#define DEFAULT_ACCELERATION 800
#define DEFAULT_XYJERK 15
Aber die 100 bei Z als maximale Beschleunigung ist geblieben.
Sorry, mehr kann ich dazu dann im Moment leider nicht beitragen.
(Bin auch nur Kaufmann und kein Techniker).
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 13:29 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 129 |
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 13:44 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
Hallo,
danke erstmal für eure spontanen Antworten.
ja Oliver, deine Rechnung ist richtig und meine Einstellungen auch. Bei DRV8825 auf 2560 und beim 4988 auf 1280.
Das Problem liegt beim Start des Motors.
Wenn ich per Hand 10mm fahre, sehe ich wie die Spindelachse genau 2x rotiert und die Z-Achse fährt 10mm hoch.
Wenn ich 10mal auf 1mm drücke, kommt am Ende nur ca. 1,8 Umdrehungen raus und die Z-Achse fährt ca. 8mm hoch.
Wenn ich 100mal 0,1mm drücke, dann noch weniger, nur noch ca. 5mm !!
Da er beim drucken ja üblicherweise 0,3 mm Schichtdicke fährt, fehlen mir am Ende einige Millimeter in der Höhe.
Irgendwie verliert er beim Start Schritte. Vielleicht ist das Anzugsmoment meiner Konstruktion zu hoch.
Ich werde mal mit geringeren Geschwindigkeiten/Beschleunigungen versuchen.
Oder erstmal den ganzen Z-Arm abschrauben und nur mit einer unbelasteten Spindel fahren.
Weiß jemand was dies: #define DEFAULT_ZJERK 0.4 // (mm/sec)
bewirkt?
Gruß
Stefan
danke erstmal für eure spontanen Antworten.
ja Oliver, deine Rechnung ist richtig und meine Einstellungen auch. Bei DRV8825 auf 2560 und beim 4988 auf 1280.
Das Problem liegt beim Start des Motors.
Wenn ich per Hand 10mm fahre, sehe ich wie die Spindelachse genau 2x rotiert und die Z-Achse fährt 10mm hoch.
Wenn ich 10mal auf 1mm drücke, kommt am Ende nur ca. 1,8 Umdrehungen raus und die Z-Achse fährt ca. 8mm hoch.
Wenn ich 100mal 0,1mm drücke, dann noch weniger, nur noch ca. 5mm !!
Da er beim drucken ja üblicherweise 0,3 mm Schichtdicke fährt, fehlen mir am Ende einige Millimeter in der Höhe.
Irgendwie verliert er beim Start Schritte. Vielleicht ist das Anzugsmoment meiner Konstruktion zu hoch.
Ich werde mal mit geringeren Geschwindigkeiten/Beschleunigungen versuchen.
Oder erstmal den ganzen Z-Arm abschrauben und nur mit einer unbelasteten Spindel fahren.
Weiß jemand was dies: #define DEFAULT_ZJERK 0.4 // (mm/sec)
bewirkt?
Gruß
Stefan
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 13:52 |
Registrierungsdatum: 10 Jahre zuvor Beiträge: 129 |
Fällt mir gerade noch ein (wäre vielleicht auch mal einen Versuch wert:
In der Firmware:
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z true
#define DISABLE_E false // For all extruders
das mal auf false setzen.
Bei true ist der Z-Motor zwischendrin stromlos und kann (je nachdem wie er grade steht) auf den letzten Vollschritt zurückfallen (oder so ähnlich).
In der Firmware:
// Disables axis when it's not being used.
#define DISABLE_X false
#define DISABLE_Y false
#define DISABLE_Z true
#define DISABLE_E false // For all extruders
das mal auf false setzen.
Bei true ist der Z-Motor zwischendrin stromlos und kann (je nachdem wie er grade steht) auf den letzten Vollschritt zurückfallen (oder so ähnlich).
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 14:41 |
Registrierungsdatum: 8 Jahre zuvor Beiträge: 13 |
Hallo Bernd,
obwohl ich zwischendurch (glaube ich) das Problem erörtert habe, ist dies eine gute Idee.
Dass werde ich nochmal probieren.
Ich habe inzwischen den Z-Arm abgebaut und den Riemen abgespannt, und mit nur einer Spindel habe ich keine Schrittverluste mehr.
Also werde ich wahrscheinlich eine höhere Untersetzung vom Motor zur Spindel brauchen (aktuell 1:2), damit er mehr Power bekommt. Speed ist ja zum Glück nicht so erforderlich.
Gruß
Stefan
obwohl ich zwischendurch (glaube ich) das Problem erörtert habe, ist dies eine gute Idee.
Dass werde ich nochmal probieren.
Ich habe inzwischen den Z-Arm abgebaut und den Riemen abgespannt, und mit nur einer Spindel habe ich keine Schrittverluste mehr.
Also werde ich wahrscheinlich eine höhere Untersetzung vom Motor zur Spindel brauchen (aktuell 1:2), damit er mehr Power bekommt. Speed ist ja zum Glück nicht so erforderlich.
Gruß
Stefan
|
Re: Velleman K8200 Erfahrungen/Baubericht 06. February 2016 17:35 |
Registrierungsdatum: 9 Jahre zuvor Beiträge: 504 |
Hallo Stefan,
ist die Geschichte denn dann so schwergängig, dass Du da Schritte verlierst?
Bei meinem OliCube MK2 habe ich ja auch 2 Spindeln, die unten über den Motor mit einem Zahnriemen beide angetrieben werden.
Übersetzung ist bei mir von Motor auf Riemen immer 1:1 mit relativ kleinen Riemenscheiben ähnlich dem vom Extruderantrieb mit Riemen.
Und auch bei mir habe ich da doch auch schon etwas Gewicht zu bewegen . Den kompletten Extruder mit Motor, die Stangen mit Büchsen X und noch den Fahrmotor/die Umlekung von X.
Ich glaube ich liege da ähnlich; (obwohl Du da doch ein langes Aluprofil und die Verbinder dabei hast.)
Der Abstand ist von Spindel zu Spindel ca. 670mm, (das wird bei Dir wohl ähnlich oder etwas mehr sein?!)
Der Steppertreiber ist auf 0,65V eingestellt und hat einen Kühlkörper.
Der Z-Motor zieht die ganze Geschichte aber locker und leichtgängig. Hatte ich am Anfang so nicht gedacht.
Bei Dir läuft die Umlenkung ja oben ab. Auch mit diversen Andruck- und Spannrädern.
Ich habe mir da das Leben etwas leichter gemacht und auf der linken Seite den Motor und darunter Spindel 1 und auf der rechten Seite Spindel 2.
Der Riemen umschlingt das alles sehr schön und mit Verschieben den Motors spanne ich recht einfach den Riemen. Das war's auch schon.
Bei Dir geht der Antrieb von unten vom Motor erst über eine Riemen, dann (vermutlich; nicht zu sehen) über eine Kupplung an das Ende der Spindel nach oben und wird dann von
links nach rechts oben auf die rechte Spindel übertragen.
Jede zusätzliche Umlenkung bedeutet ja auch Reibung und der Riemen oben darf auch nicht zu stark gespannt sein, da ja sonst die Sache auch schwerer läuft
bzw. die Spindeln oben nach innen gezogen werden.
Bei mir werden quasi beide Spindeln von unten direkt (bzw. über den Kuppler pro Spindel) angetrieben.
In das Kunststoffteil sind 2 Kugellager eingepresst und zwischen dem Kuppler und dem oberen Teil liegt noch ein Axiallager.
So habe ich auf den Lager nur sehr kurze Hebelwege um eine gute Riemenspannung anzulegen.
Vielleicht wäre mein Konzept ja auch was für Dich?
Ob das oben oder unten angewandt wird, wäre ja wahrscheinlich egal.
Vorschlag: Ich würde bei Dir den Motor oben links hinter der linken Spindel montieren.
Den Riemen dann von Motor über linke Spindel an rechte Spindel und wieder an den Motor laufen lassen.
Über Verschieben des Motors kann man dann den Riemen etwas spannen und gut.
Wenn Du so ein weisses Riemenrad auch für den Motor machst, kann Du da sicherlich gut mit 1:1 Übersetzung an allen 3 Punkten arbeiten.
Natürlich noch in der Firmware die Drehrichtung des Motors umpolen.
Ich habe mich bewußt gegen einen 2. Motor für rechts entschieden, da ich ja manuell noch oben an den Spindeln kurbeln will und falls ich auf einer Seite
Schrittverluste hätte, würde es mir die ganze Ebene schrägziehen. Deshalb hatte ich mir da den direkten Antrieb der beiden Spindeln ausgedacht.
Übrigens: Die Anregung von Bernd habe ich schon recht früh an meinem normalen K8200 umgesetzt und auch für den Eigenbau übernommen.
Seinerzeit hatte ich auch den Eindruck, dass das zur Gleichmäßigkeit der Layerlagen beigetragen hatte.
Hier mal Bilder (unten sieht man dann einen recht dünnen Riemen umlaufen 6AT2.5-1000 oder so; habe ich mir von einem Lieferanten von unserem Betrieb aus Meterware schweißen lassen,
da es diese Riemenlänge nicht mehr endlos gibt. Aber die Zugkräfte halten sich ja da im Rahmen und ein verschweißter Riemen ist absolut ok.)
linke Seite mit Motor und Spindel
rechte Seite nur Spindel
Gruß
Oli
5-mal bearbeitet. Zuletzt am 06.02.16 18:35.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]
ist die Geschichte denn dann so schwergängig, dass Du da Schritte verlierst?
Bei meinem OliCube MK2 habe ich ja auch 2 Spindeln, die unten über den Motor mit einem Zahnriemen beide angetrieben werden.
Übersetzung ist bei mir von Motor auf Riemen immer 1:1 mit relativ kleinen Riemenscheiben ähnlich dem vom Extruderantrieb mit Riemen.
Und auch bei mir habe ich da doch auch schon etwas Gewicht zu bewegen . Den kompletten Extruder mit Motor, die Stangen mit Büchsen X und noch den Fahrmotor/die Umlekung von X.
Ich glaube ich liege da ähnlich; (obwohl Du da doch ein langes Aluprofil und die Verbinder dabei hast.)
Der Abstand ist von Spindel zu Spindel ca. 670mm, (das wird bei Dir wohl ähnlich oder etwas mehr sein?!)
Der Steppertreiber ist auf 0,65V eingestellt und hat einen Kühlkörper.
Der Z-Motor zieht die ganze Geschichte aber locker und leichtgängig. Hatte ich am Anfang so nicht gedacht.
Bei Dir läuft die Umlenkung ja oben ab. Auch mit diversen Andruck- und Spannrädern.
Ich habe mir da das Leben etwas leichter gemacht und auf der linken Seite den Motor und darunter Spindel 1 und auf der rechten Seite Spindel 2.
Der Riemen umschlingt das alles sehr schön und mit Verschieben den Motors spanne ich recht einfach den Riemen. Das war's auch schon.
Bei Dir geht der Antrieb von unten vom Motor erst über eine Riemen, dann (vermutlich; nicht zu sehen) über eine Kupplung an das Ende der Spindel nach oben und wird dann von
links nach rechts oben auf die rechte Spindel übertragen.
Jede zusätzliche Umlenkung bedeutet ja auch Reibung und der Riemen oben darf auch nicht zu stark gespannt sein, da ja sonst die Sache auch schwerer läuft
bzw. die Spindeln oben nach innen gezogen werden.
Bei mir werden quasi beide Spindeln von unten direkt (bzw. über den Kuppler pro Spindel) angetrieben.
In das Kunststoffteil sind 2 Kugellager eingepresst und zwischen dem Kuppler und dem oberen Teil liegt noch ein Axiallager.
So habe ich auf den Lager nur sehr kurze Hebelwege um eine gute Riemenspannung anzulegen.
Vielleicht wäre mein Konzept ja auch was für Dich?
Ob das oben oder unten angewandt wird, wäre ja wahrscheinlich egal.
Vorschlag: Ich würde bei Dir den Motor oben links hinter der linken Spindel montieren.
Den Riemen dann von Motor über linke Spindel an rechte Spindel und wieder an den Motor laufen lassen.
Über Verschieben des Motors kann man dann den Riemen etwas spannen und gut.
Wenn Du so ein weisses Riemenrad auch für den Motor machst, kann Du da sicherlich gut mit 1:1 Übersetzung an allen 3 Punkten arbeiten.
Natürlich noch in der Firmware die Drehrichtung des Motors umpolen.
Ich habe mich bewußt gegen einen 2. Motor für rechts entschieden, da ich ja manuell noch oben an den Spindeln kurbeln will und falls ich auf einer Seite
Schrittverluste hätte, würde es mir die ganze Ebene schrägziehen. Deshalb hatte ich mir da den direkten Antrieb der beiden Spindeln ausgedacht.
Übrigens: Die Anregung von Bernd habe ich schon recht früh an meinem normalen K8200 umgesetzt und auch für den Eigenbau übernommen.
Seinerzeit hatte ich auch den Eindruck, dass das zur Gleichmäßigkeit der Layerlagen beigetragen hatte.
Hier mal Bilder (unten sieht man dann einen recht dünnen Riemen umlaufen 6AT2.5-1000 oder so; habe ich mir von einem Lieferanten von unserem Betrieb aus Meterware schweißen lassen,
da es diese Riemenlänge nicht mehr endlos gibt. Aber die Zugkräfte halten sich ja da im Rahmen und ein verschweißter Riemen ist absolut ok.)
linke Seite mit Motor und Spindel

rechte Seite nur Spindel

Gruß
Oli
5-mal bearbeitet. Zuletzt am 06.02.16 18:35.
3DRag alias Velleman K8200, 80mm Objektlüfter, Extruder mit GT2-Riemenantrieb, E3D-Hotend mit 40mm Lüfter,
Z-Links: 1 x Kugelumlaufspindel 12x4, Z-Rechts: 2. Kugelbüchse, X/Y-Umbau auf GT2-Riemen, 24V/120W Netzteil
für Bett via Relais-Schaltung, vom Board gesteuerter Hotend- und Logiklüfter via MosFET-Schaltung.
Weitere/detailliertere Infos zu Umbauten/Eigenkonstruktionen an/von meinem/meinen 3D-Drucker(n) findet Ihr unter:
[www.oliver-schlenker.dyndns.org]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.